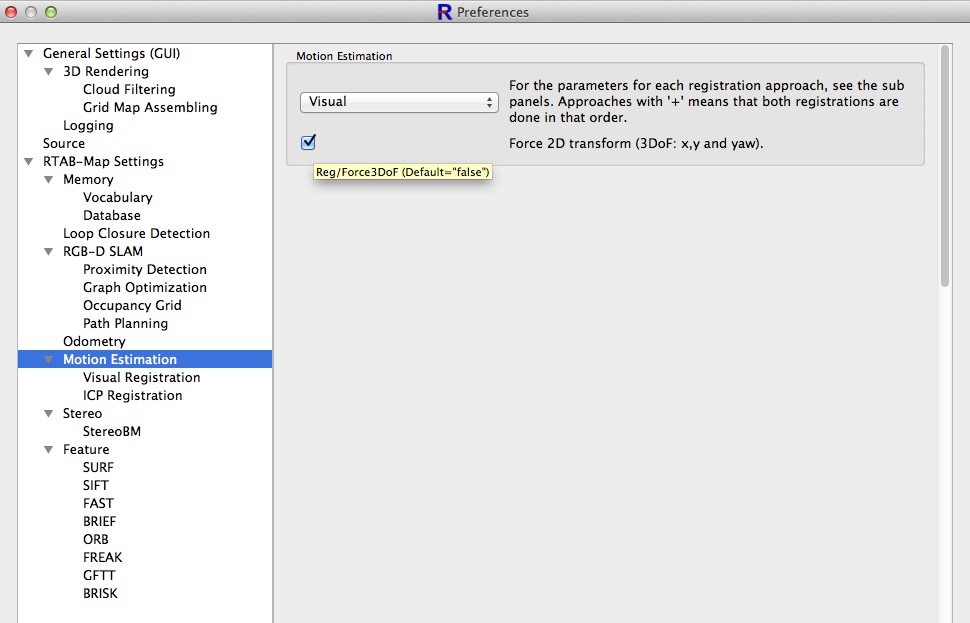
Thanks Mathieu. Yes, it is the standalone software. That works. It is great to find the Advanced settings in the Preferences. :-)
Now I have two questions:
(1)
I am now trying to save the data when using the rgbd_mapping_kinect2.launch. Here are the commands:
1st terminal:
$ roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true
2nd terminal:
$ roslaunch rtabmap_ros rgbd_mapping_kinect2_horizontal.launch
rgbd_mapping_kinect2_horizontal.launch3rd terminal:
$ roslaunch rtabmap_ros data_recorder.launch frame_id:=kinect2_base_link subscribe_depth:=true rgb_topic:=kinect2/hd/image_color_rect rgb_info_topic:=kinect2/hd/camera_info depth_topic:=kinect2/hd/image_depth_rect rgb_image_transport:=compressed depth_image_transport:=compressed output_path:=/home/app16/out.db
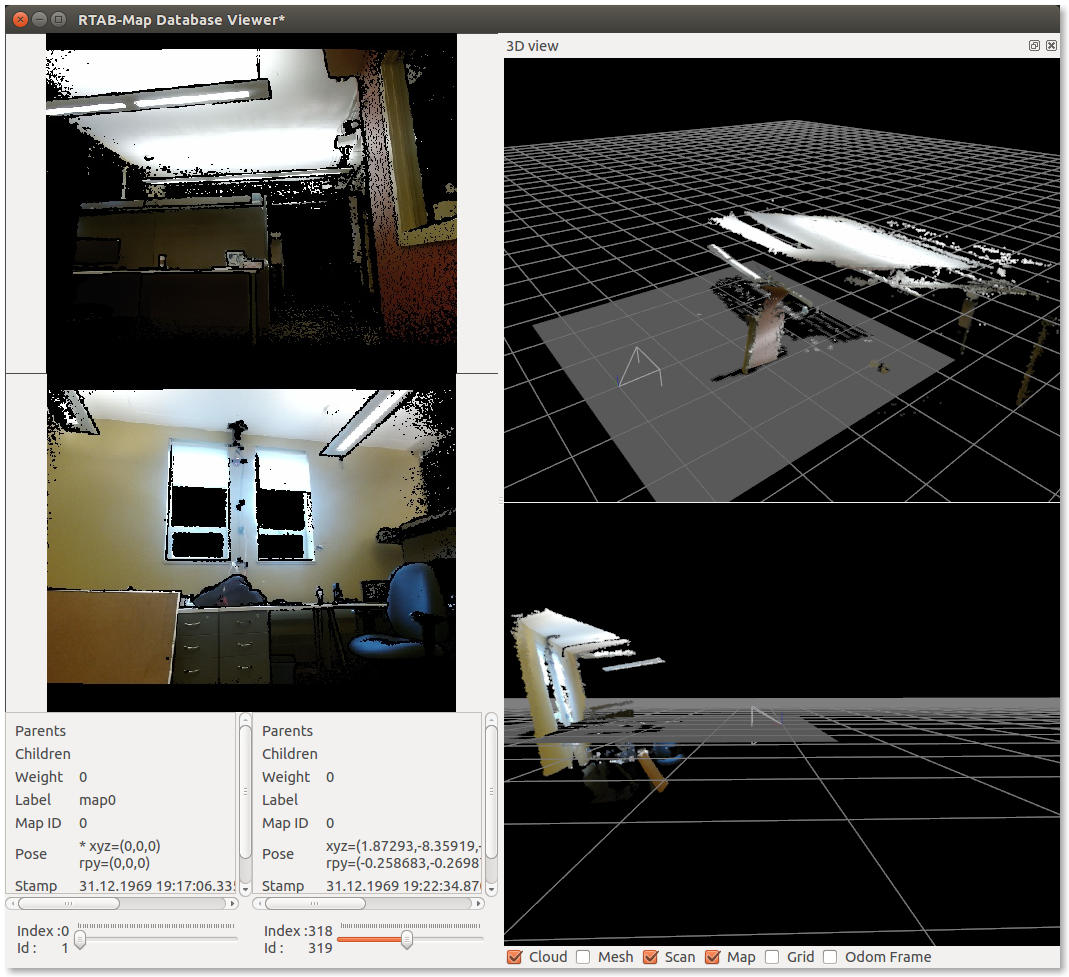
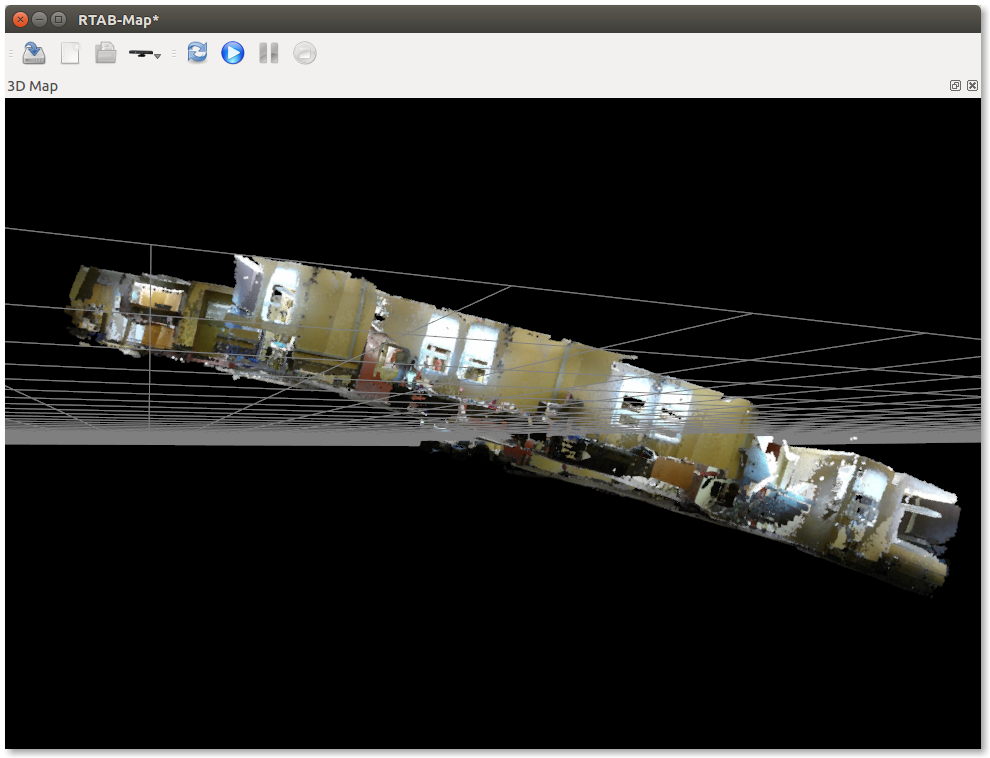
It saved the out.db data. However, when I used the standalone RTABMAP software to load the .db file, the data is not shown. Is the commends I used proper for saving the db data?
(2)
Meanwhile, I tried to save the data in rosbag, and convert it to .db. I changed the commend in the 3rd terminal to (the other two terminal kept the same):
$ rosbag record -O slam_kinect /tf /kinect2/hd/image_depth_rect/compressed /kinect2/hd/camera_info /kinect2/hd/image_color_rect/compressed /kinect2/hd/image_mono_rect/compressed /scan /scan_kinect /rtabmap/odom_local_map /rtabmap/labels /rtabmap/scan_map /rtabmap/octomap_empty_space /rtabmap/odom_info /rtabmap/local_path /rtabmap/goal_reached /rtabmap/octomap_proj /rtabmap/info /rtabmap/move_base/goal /rtabmap/grid_map /rtabmap/goal_out /rtabmap/octomap_full /rtabmap/odom_last_frame /rtabmap/move_base/cancel /rtabmap/proj_map /rtabmap/mapGraph /rtabmap/octomap_binary /rtabmap/octomap_cloud /rtabmap/mapData /rtabmap/cloud_map /rtabmap/cloud_ground /rtabmap/cloud_obstacles /rtabmap/odom /scanmatch_odom /rtabmap/octomap_occupied_space /rtabmap/proj_map
Here is the .bag file recorded:
https://www.dropbox.com/s/e8pdp2mdg6ptf5b/slam_kinect.bag?dl=0Then tried to convert the data:
$ roscore
$ roslaunch rtabmap_ros data_recorder.launch frame_id:=kinect2_base_link subscribe_depth:=true rgb_topic:=kinect2/hd/image_color_rect rgb_info_topic:=kinect2/hd/camera_info depth_topic:=kinect2/hd/image_depth_rect rgb_image_transport:=compressed depth_image_transport:=compressed output_path:=/home/app16/out.db
$ rosbag play --clock slam.bag
It was the same, the data could not be shown in the RTABMAP software. Here is an error that was shown when I run the conveting:
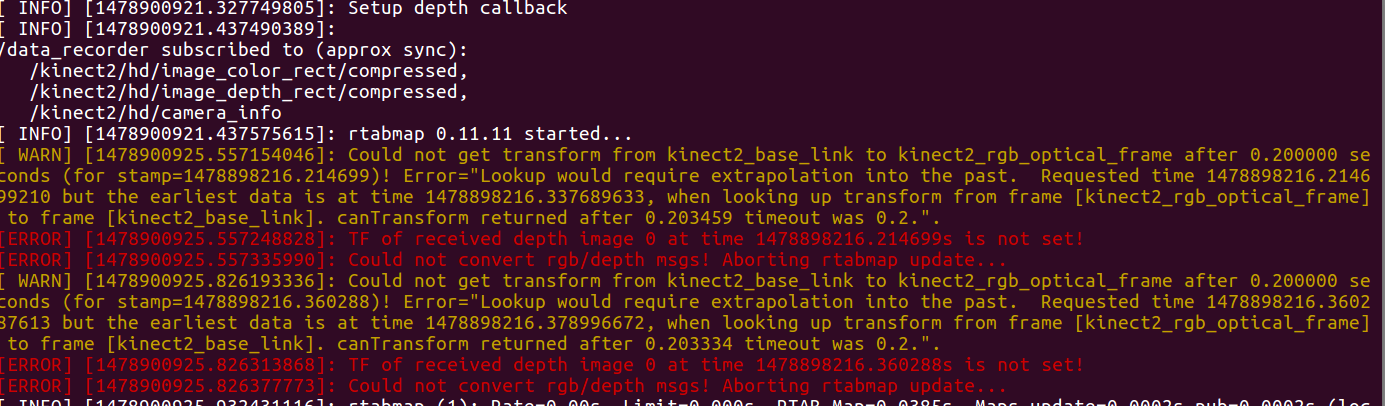
Then, I changed "data_recorder.launch" to "data_recorder_1.launch" by adding some frame relationship, and run it again:
$ roslaunch rtabmap_ros data_recorder_1.launch subscribe_depth:=true frame_id:=kinect2_base_link rgb_topic:=kinect2/hd/image_color_rect rgb_info_topic:=kinect2/hd/camera_info depth_topic:=kinect2/hd/image_depth_rect rgb_image_transport:=compressed depth_image_transport:=compressed output_path:=/home/app16/bag.db
$ rosbag play --clock slam.bag
This time the error information is:

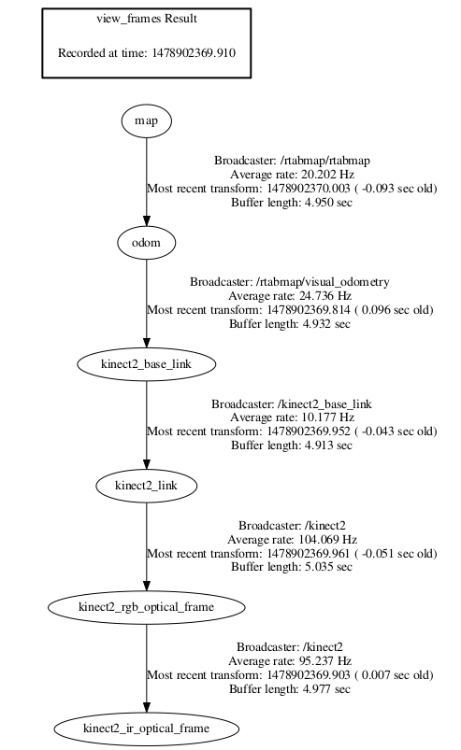
However, when I check the frame informaiton, my .bag file has the depth data, but does not have the depth frame:
Thanks,
You Li