Hi,
You can open the Graph View (Windows->Show view->Graph view) and mouse over the blue dots:
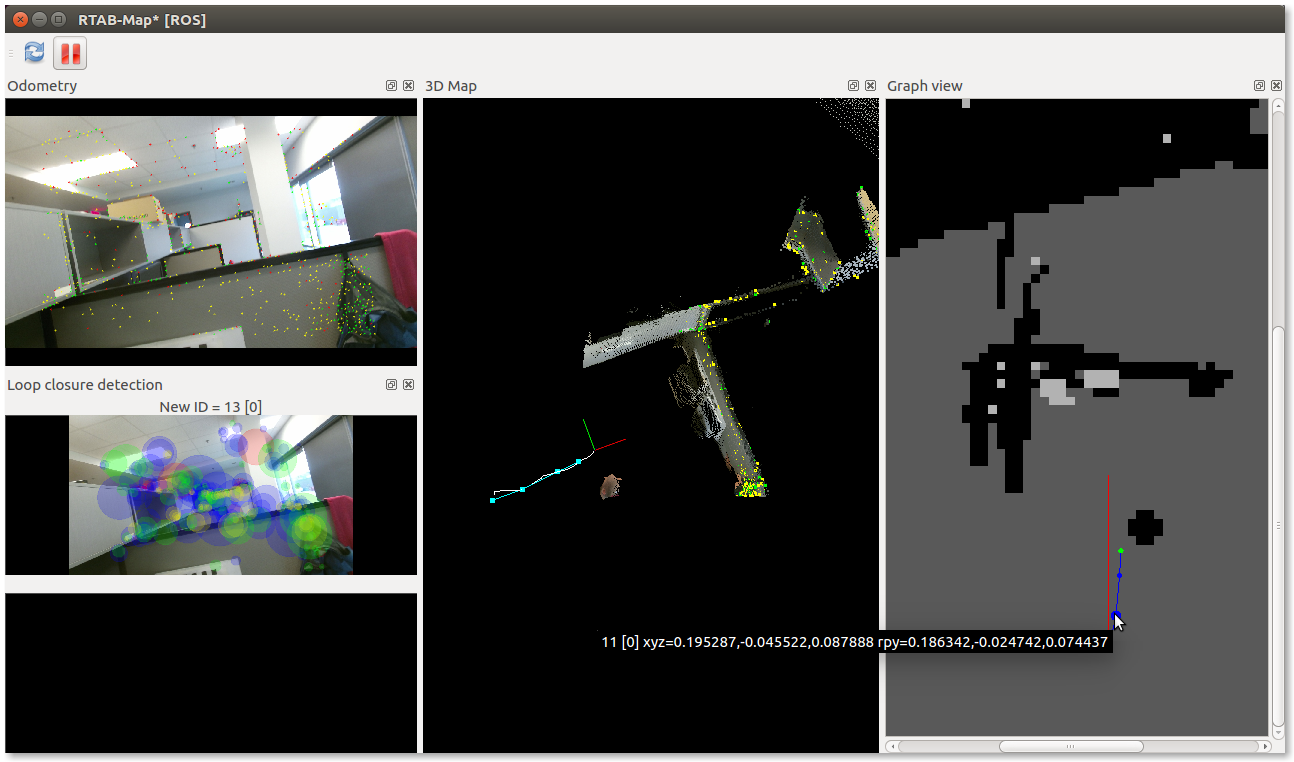
You can also do File->Export poses to export all the poses (raw format is 3x4 matrix [R O'] where O=[x y z] and R the rotation matrix):
1.000000 0.000216 -0.000027 -0.000038 -0.000216 1.000000 -0.000006 0.000319 0.000027 0.000006 1.000000 0.000212
0.996926 -0.077652 -0.010466 0.195287 0.074346 0.979626 -0.186561 -0.045522 0.024740 0.185209 0.982388 0.087888
0.997031 -0.075059 0.017180 0.427887 0.076998 0.970020 -0.230503 -0.065945 0.000637 0.231142 0.972920 0.171870
0.999861 0.016587 -0.001660 0.567675 -0.016408 0.961728 -0.273515 -0.074285 -0.002940 0.273505 0.961866 0.196490
On ROS, you can show the graph:
$ rostopic echo /rtabmap/mapGraph/poses
-
position:
x: -3.82752041332e-05
y: 0.000318910548231
z: 0.000211660706555
orientation:
x: 3.11282929033e-06
y: -1.36729213409e-05
z: -0.00010794717673
w: 1.0
-
position:
x: 0.195287168026
y: -0.0455224364996
z: 0.0878878459334
orientation:
x: 0.093423159901
y: -0.00884696812542
z: 0.0381958274305
w: 0.994854211921
-
position:
x: 0.427887231112
y: -0.0659453198314
z: 0.171870052814
orientation:
x: 0.116287108322
y: 0.00416723027968
z: 0.0383026763441
w: 0.992468058351
-
position:
x: 0.567674875259
y: -0.0742847025394
z: 0.196489796042
orientation:
x: 0.13808263357
y: 0.000323201520313
z: -0.00832889561823
w: 0.990385634628
cheers,
Mathieu

