Ubuntu 16.04
Intel UP Board
Intel Realsense R200
Distributed ROS with a Lenovo W540
*******************************
Hi, I am running RTAB-Map on my Lenovo W540 running Ubuntu 16.04. I am using distributed ROS to grab data from an Intel UP Board (that's connected to the R200), so that I can run RTAB-Map and bootup the camera on my Lenovo. I've run the commands
[roslaunch realsense_camera r200_nodelet_rgbd.launch]
[roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/depth_registered/sw_registered/image_rect_raw]
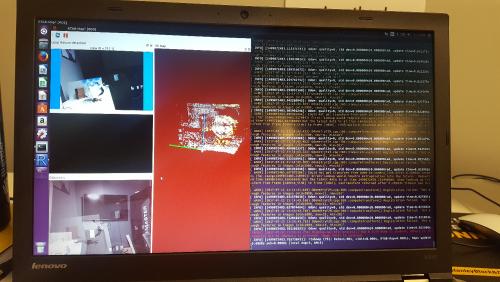
It seems that it's working correctly, but two things happen. One "screen" is black, but seem like it's supposed to display some data. And secondly, it seems like any movement will mess up the odometry and give me the red background. I feel like I'm missing something because it shouldn't have so many problems on default. Also, upon starting RTAB-Map, it keeps flashing back and forth from the warning (yellow) background to black background rapidly.