Hi
I am using a diff drive robot, with an rgbd sensor and lidar. The wheels have quadrature encoders.
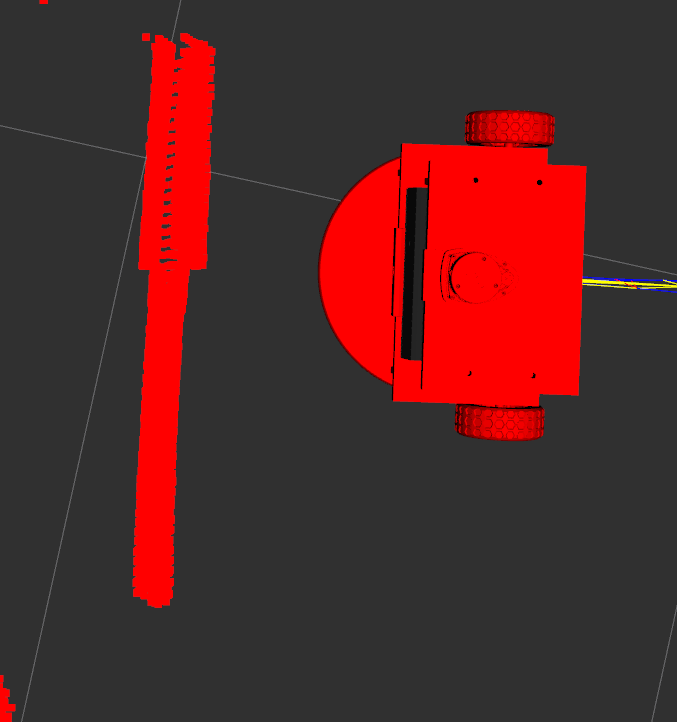
I've been battling for a while with ghosting in my 3d maps, and tried testing my odometry with the ROS wiki method of setting the laser decay time to something high, and then moving the bot. This is what I am getting for translations from a flat board:
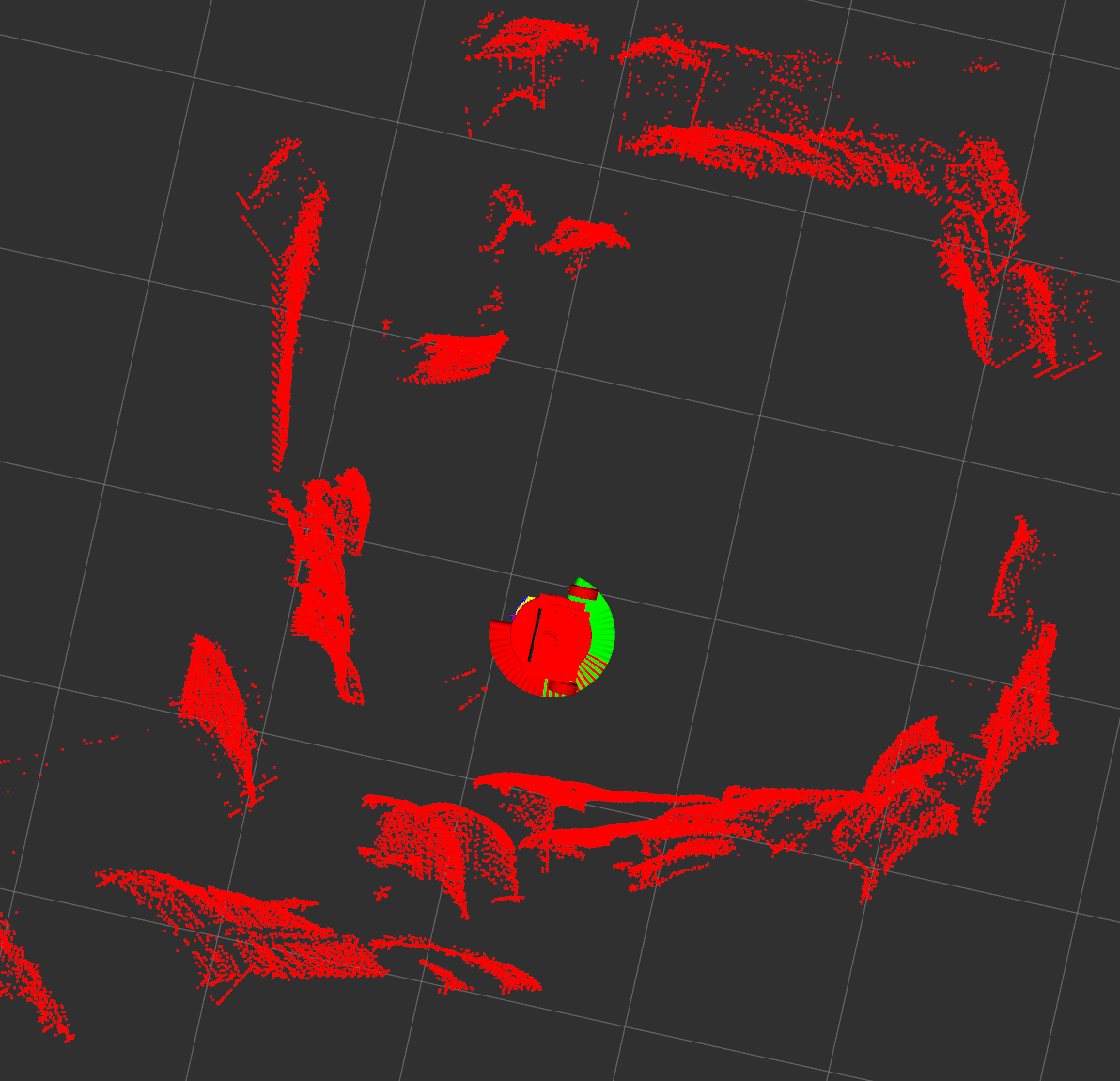
and for rotations (taken in a room with flat edges / bookcases etc):
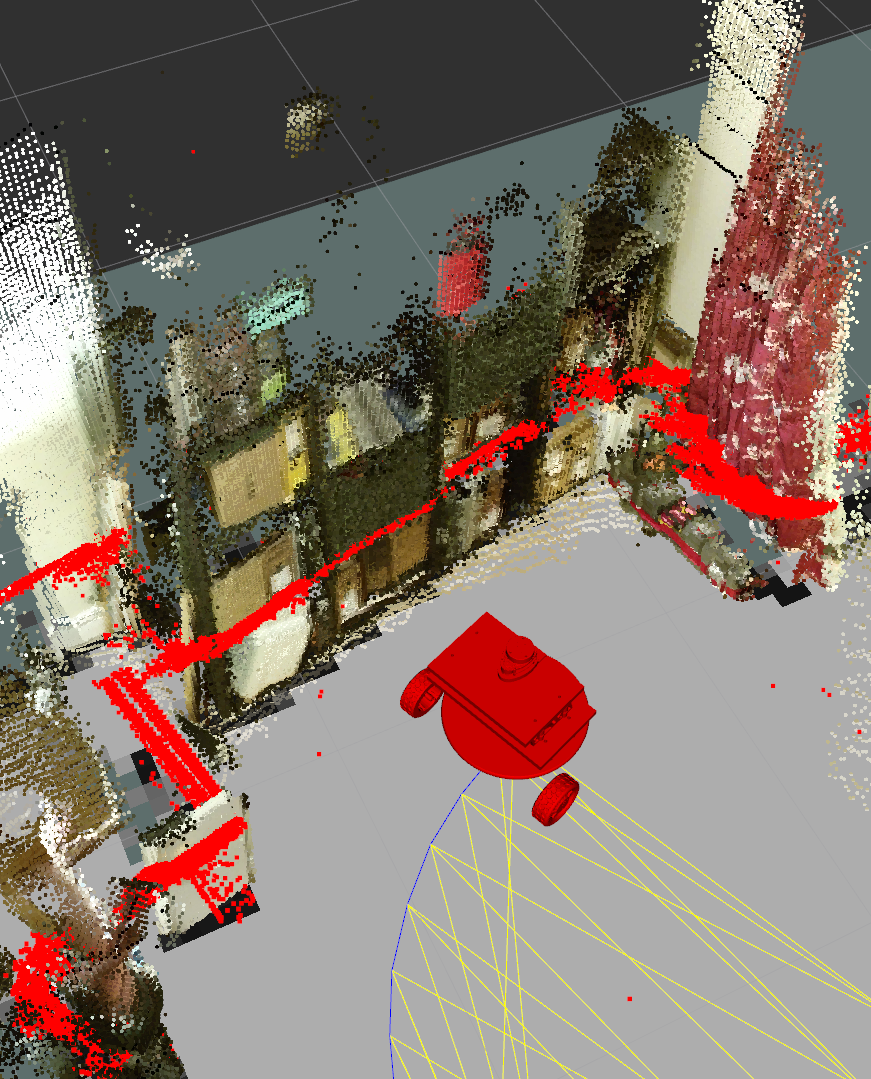
Overlaid on rtabmap in rviz:
Example of localized smearing with laser overlaid, just after a rotation. Repeated chair legs, door and bookshelf edge:
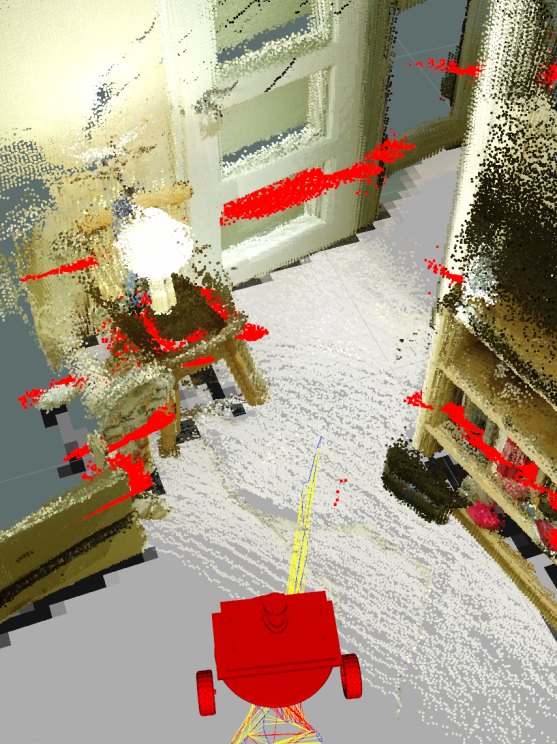
I am rotating at speed 0.15 when I do this, so pretty slow.
I am using the icp setting for the laser scan, and I have wheel encoders providing odometry. Might this drift with the odom account for the smearing that seems to crop up when I rotate? Cheers!

