Hi,
This warning comes from inside the rtabmap library. The library uses point clouds instead of laser scans, so the laser scans are converted to point clouds. The point clouds contain only valid scan values. The filling algorithm set empty space between 2 valid points. If the point cloud is empty, the filling algorithm cannot work (giving this warning).
The reason why the filling empty space option is disabled by default is that it may be difficult to know if a null depth value from the Kinect is infinity or invalid. For example, you don't want to fill empty space in front of the robot if you put your hand directly on the sensor to hide it. Invalid values are threaten as unknown values so it is why the cells are still kept at unknown state.
I don't know in which kind of environment you are, but if there are enough obstacles detected by the kinect under its maximum range (e.g., ~10 meters), you could get maps like these (created using
demo_turtlebot_mapping.launch):
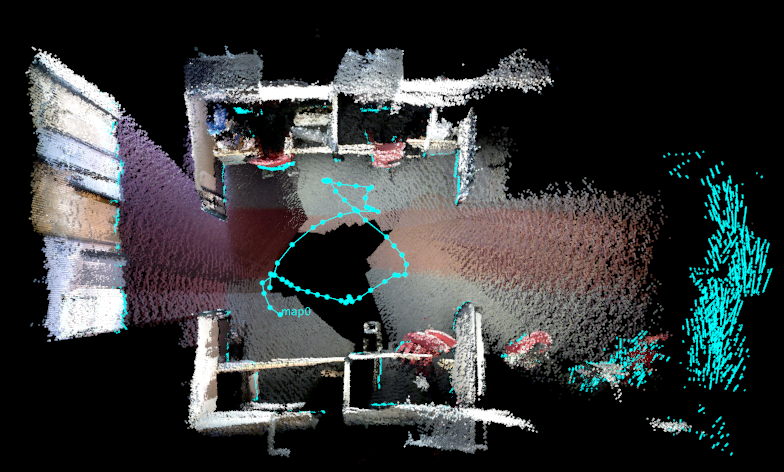
"/rtabmap/cloud_map" (3D point cloud):
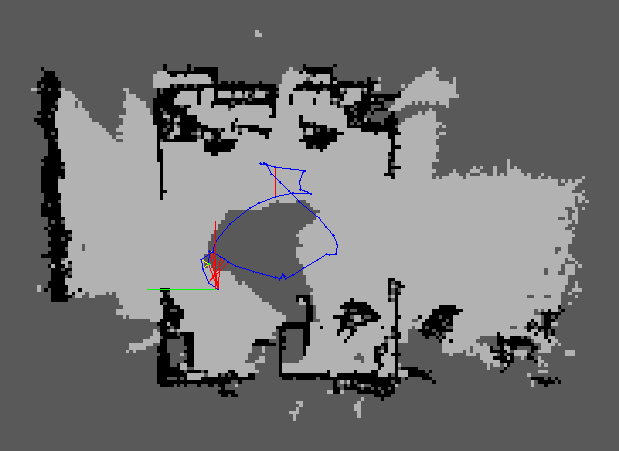
"/rtabmap/grid_map" (from laser scans created by
depthimage_to_laserscan):

"/rtabmap/proj_map" (from projection of the 3D point cloud above):
cheers

