The running rqt graph looks like so:
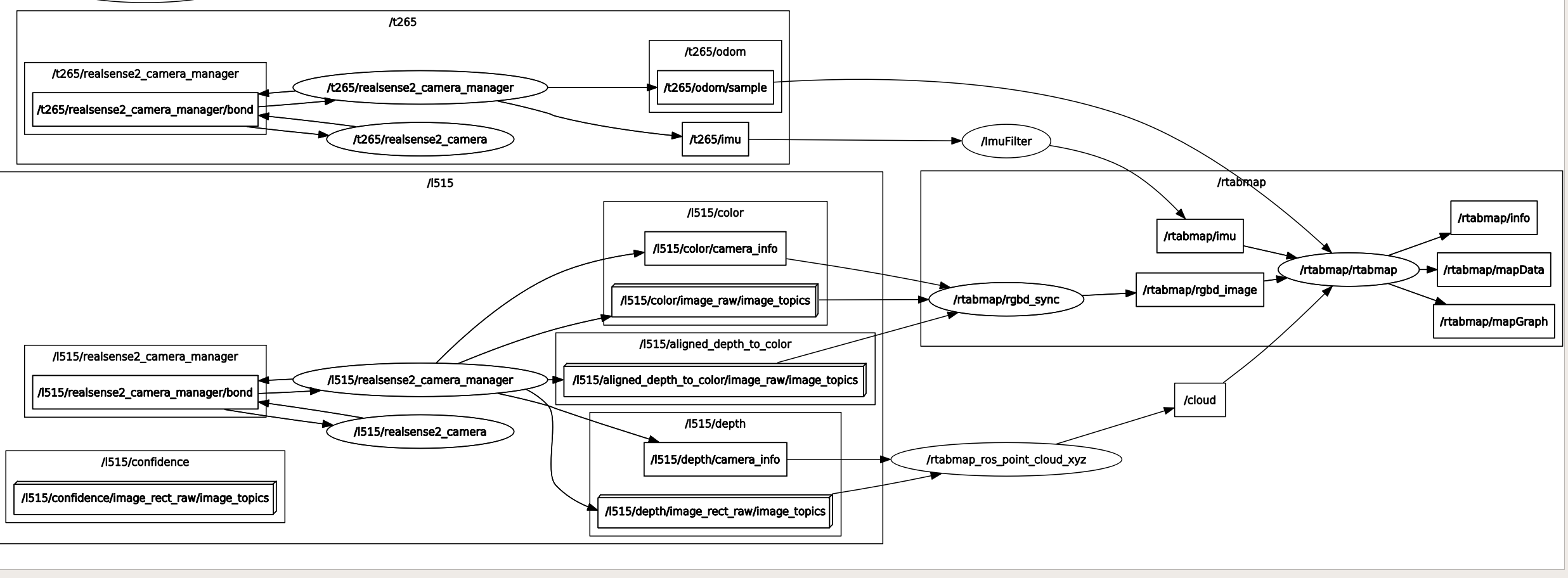
All topics are being well published and fed into /rtabmap/rtabmap. However, I'm still getting the following error:
[ WARN] [1624482552.053071361]: /rtabmap/rtabmap: Did not receive data since 5 seconds! Make sure the input topics are published ("$ rostopic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=10).
/rtabmap/rtabmap subscribed to (approx sync):
/t265/odom/sample \
/rtabmap/rgbd_image \
/cloud
This is the command I am running:
roslaunch rtabmap_ros rtabmap.launch args:="-d --Mem/UseOdomGravity true --Optimizer/GravitySigma 0.3" odom_topic:=/t265/odom/sample frame_id:=t265_link rgbd_sync:=true depth_topic:=/l515/aligned_depth_to_color/image_raw rgb_topic:=/l515/color/image_raw camera_info_topic:=/l515/color/camera_info approx_rgbd_sync:=false visual_odometry:=false wait_imu_to_init:=true imu_topic:=/rtabmap/imu scan_cloud_topic:=/cloud subscribe_scan_cloud:=true

