Hi everyone
I'm using the Asus Zenfone AR with Tango with RTAB-Map app.
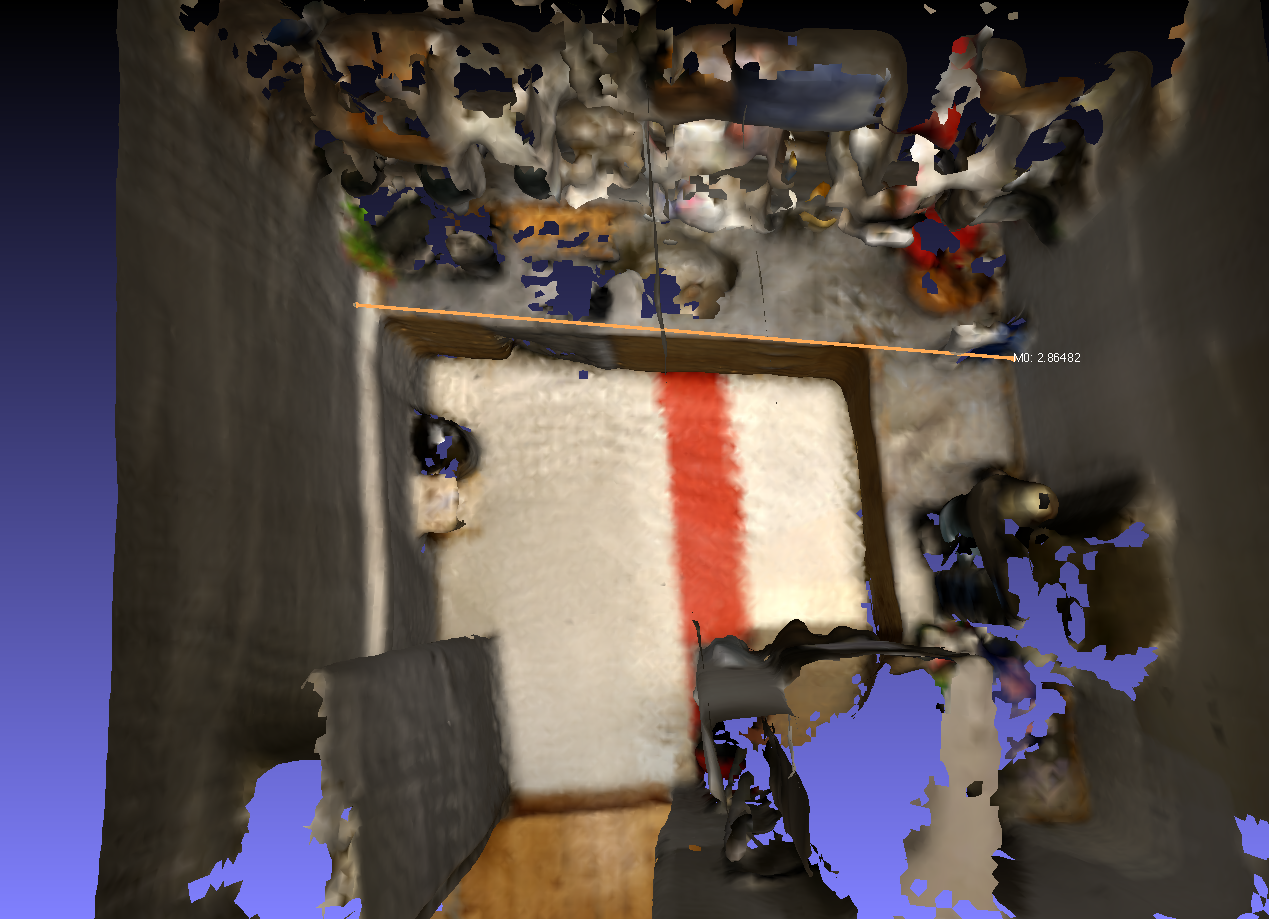
I have a small room that I'm creating my tests in. Generally there's a lot of items in the room which should be ideal for this RTAB approach, but I'm having some trouble with the accuracy of the vertical planar surfaces (the walls).
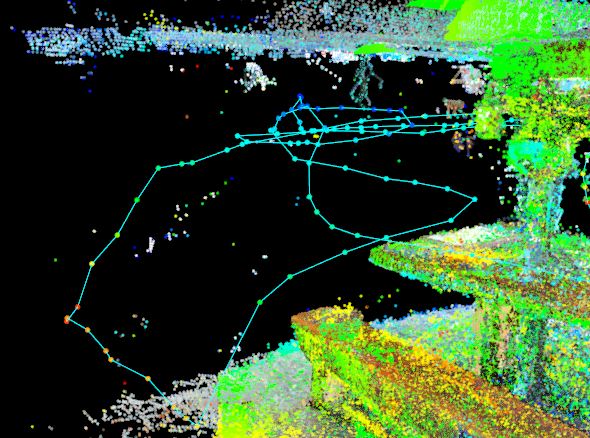
I think it might be the loop closures or something in that direction, since, it seems, that the walls get a little skewed, which I think is why I get the error in the accuracy.
I've tried multiple optimizations with postprocessing and different runs of the .db on standalone desktop app afterwards, but it seems to me that the initial scan just might not be good enough.
In general there's also some "ghosting" apparent with multiple layers of wall outside each other, although it differs a little depending on the settings I use on the desktop.
It seems to me that it makes a small drift or rotation on walls in the back and bottom corner, which means the accuracy at this point is between 35-60 mm. I need the accuracy to be maximum 20mm, which I know the sensors can handle.
I've tried using SIFT, SURF and GFFT-BRIEF.
I've tried bumping the visual features to 400 and 1000.
Any thoughts on optimal settings for the Tango device for this kind of environment, if the initial scan simply isn't good enough?
I've tried another app called AR Planar which seems to get it right with a precision of 5 mm.
This app seems to recognise wall sections that roughly align and then merge them when scanned over multiple times.
Is the proximity setting doing the same thing in RTAB Map?
Any help or suggestions on this is appreciated. I'm crazy about the potential of this program for me, if I can just get the accuracy a little better :-)
I have a few links here for the database, and for some screenshots of some of the settings I've tried.
https://www.dropbox.com/sh/022jhjfqwxetk80/AAAAIqRzn6cOHThnGClHS9Sda?dl=0On a side note, there's an option in the Tango app to use the fish-eye lens, but that doesn't seem to work on my phone. Is this only for the Phab, or what is it for?