Hey Guys,
I just asked another question on this forum and mentioned that I've been facing some problems in the project that I'm working on using RTabMap. This post is for the second question that I had. Again I really appreciate all the help.
So in summary, I'm fairly new with RTabMap. I've been working with RTabMap using a D435i sensor based on the tutorial given by Intel,
https://github.com/IntelRealSense/realsense-ros/wiki/SLAM-with-D435iAnd I am using
$ roslaunch realsense2_camera opensource_tracking.launch
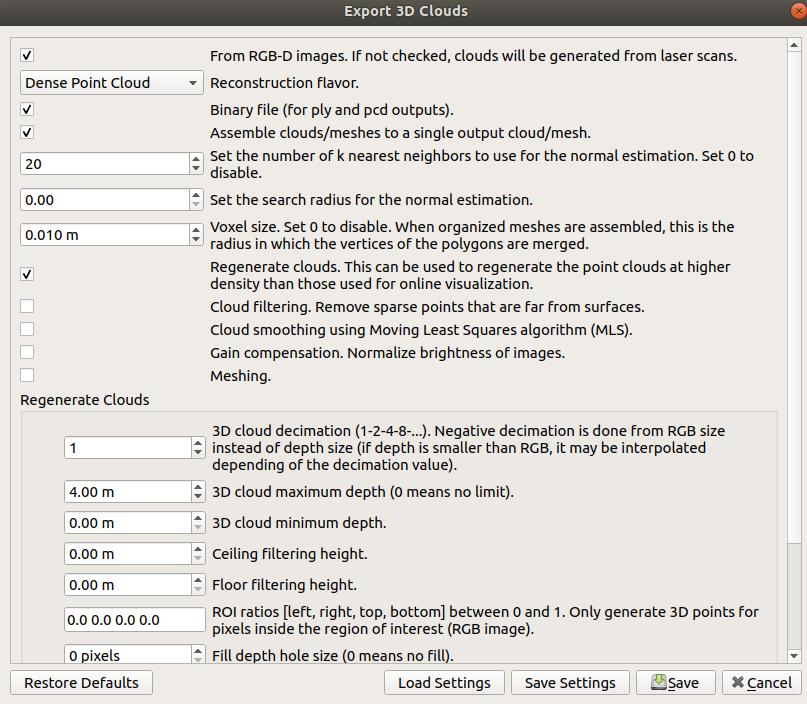
I'm currently working on a project which deals with Autonomous 3D scanning of Cotton Plants and then using segmentation networks to detect the Cotton Bolls. Therefore the robot is not going to move in a loop and it is just going to move on a straight path with a constant speed (Assuming speed is a variable that I can control). It is very important to us that our point clouds be as high in density as possible. Right now, after I'm downloading the map graph from Rviz and extracting it from ~/.ros/rtabmap.db, I am setting the voxel size to 0 and decimation to lowest possible as well. And the result is fairly dense. I wanted to know if the density can get any higher? Is there any other parameter than I can work with that will increase the density even more without ruining anything else? like the quality of the point cloud.
Also is there a way to extract the point cloud automatically (for example using a command) to export the point cloud from the database without needing to manually open the standalone app from rtabmap.
Again, thank you for your help