Thx a lot!
Now, i am facing with another problem.
Using two kinect v2, I have build a map. I want to use this map do localization.
I checked here you refered;
http://wiki.ros.org/rtabmap_ros/Tutorials/HandHeldMapping#Localization_modeand changed something in my launch file:
<launch>
<arg name="localization" default="false"/>
<arg name="rviz" default="true" />
<arg name="rtabmapviz" default="true" />
<node pkg="tf" type="static_transform_publisher" name="camera_base_to_camera1_tf"
args="0.0 0.0 0.0 -1.5707963267948966 0 -1.5707963267948966 /camera1_base_link /camera1_link 100" />
<node pkg="tf" type="static_transform_publisher" name="camera_base_to_camera2_tf"
args="0.0 0.0 0.0 -1.5707963267948966 0.0 -1.5707963267948966 /camera2_base_link /camera2_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera1_tf"
args="0.0 0.0 0.0 0.0 -0.17 0.0 /base_link /camera1_base_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera2_tf"
args="-0.1375 -0.233 0 -1.570796327 -0.4 -0.04 /base_link /camera2_base_link 100" />
<node pkg="nodelet" type="nodelet" name="nodelet_manager" args="manager"/>
<node pkg="nodelet" type="nodelet" name="rgbd_sync" args="load rtabmap_ros/rgbd_sync nodelet_manager">
<remap from="rgb/image" to="/camera1/qhd/image_color_rect"/>
<remap from="depth/image" to="/camera1/qhd/image_depth_rect"/>
<remap from="rgb/camera_info" to="/camera1/qhd/camera_info"/>
<remap from="rgbd_image" to="/camera1/rgbd_image"/>
</node>
<node pkg="nodelet" type="nodelet" name="rgbd_sync2" args="load rtabmap_ros/rgbd_sync nodelet_manager">
<remap from="rgb/image" to="/camera2/qhd/image_color_rect"/>
<remap from="depth/image" to="/camera2/qhd/image_depth_rect"/>
<remap from="rgb/camera_info" to="/camera2/qhd/camera_info"/>
<remap from="rgbd_image" to="/camera2/rgbd_image"/>
</node>
<group ns="rtabmap">
<node pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen">
<remap from="rgbd_image0" to="/camera1/rgbd_image"/>
<remap from="rgbd_image1" to="/camera2/rgbd_image"/>
</node>
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen">
<remap from="rgbd_image0" to="/camera1/rgbd_image"/>
<remap from="rgbd_image1" to="/camera2/rgbd_image"/>
</node>
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<remap from="rgbd_image0" to="/camera1/rgbd_image"/>
<remap from="rgbd_image1" to="/camera2/rgbd_image"/>
</node>
</group>
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/rgbd.rviz"/>
</launch>
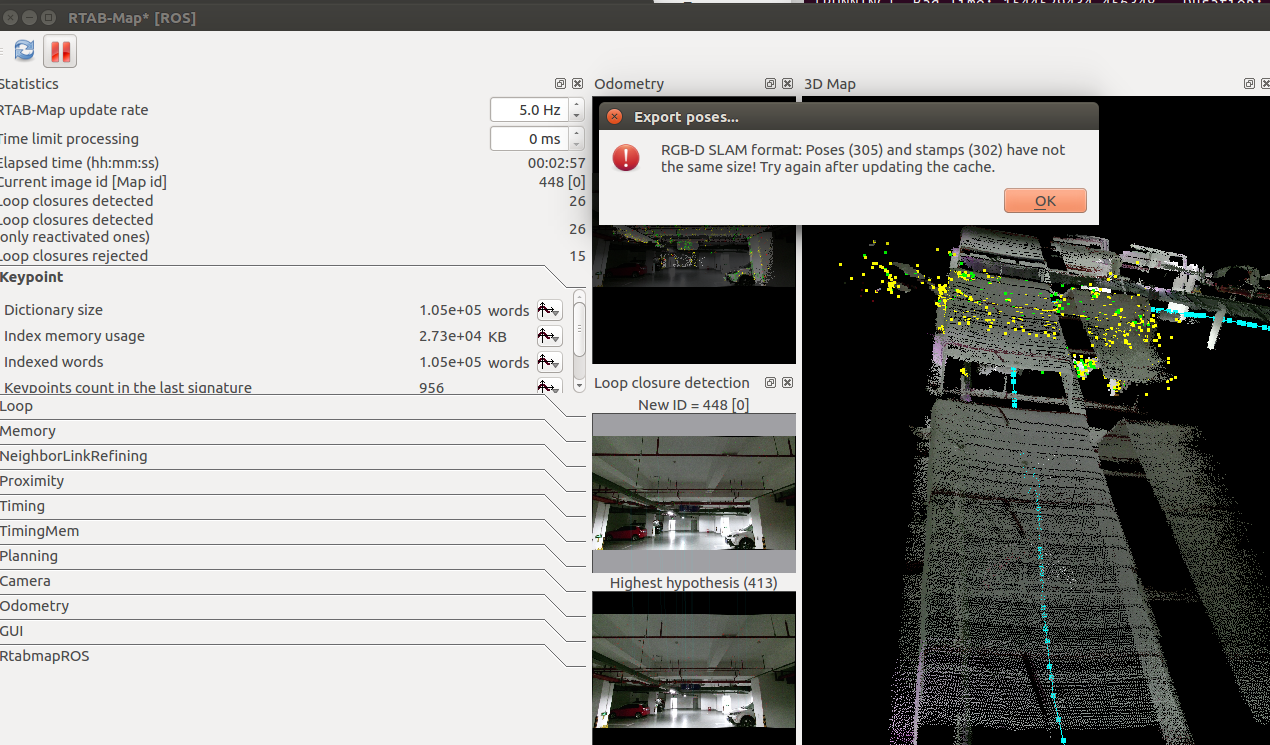
Then,I want to do Edit->"Download map" to download the map from the rtabmap node, but some errors occur:
/rtabmap/rtabmapviz subscribed to (approx sync):
/rtabmap/odom,
/camera1/rgbd_image,
/camera2/rgbd_image,
/rtabmap/odom_info
[ INFO] [1545574934.549221003]: rtabmapviz started.
[ INFO] [1545574939.090858246]: visual_odometry: paused!
[ERROR] [1545574939.092854262]: Can't call "pause" service
[ERROR] [1545574941.783595237]: Can't call "resume" service
[ INFO] [1545574941.785371218]: visual_odometry: resumed!
[ WARN] [1545574951.344341305]: Can't call "get_map_data" service
[ERROR] (2018-12-23 22:22:31.345) MainWindow.cpp:3754::processRtabmapEvent3DMap() Map received with code error 1!
[ INFO] [1545574951.357153149]: visual_odometry: paused!
[ERROR] [1545574951.357875625]: Can't call "pause" service
How can i solve this problem?