Hi,
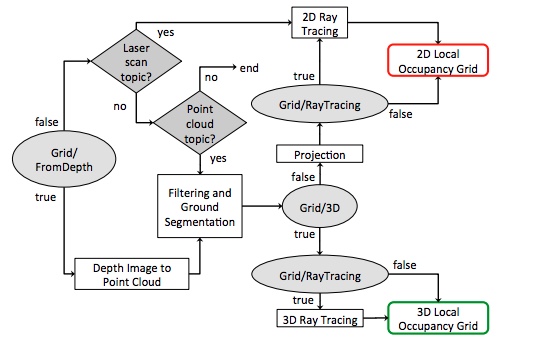
Parameters can be set under rtabmap node:
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap" args="-d">
<param name="Grid/3D" value='true"/>
<param name="Grid/RayTracing" value='true"/>
...
</node>
or
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap" args="-d --Grid/3D true --Grid/RayTracing true">
...
</node>
or if you use rtabmap.launch:
roslaunch rtabmap_ros rtabmap.launch args:="-d --Grid/3D true --Grid/RayTracing true"
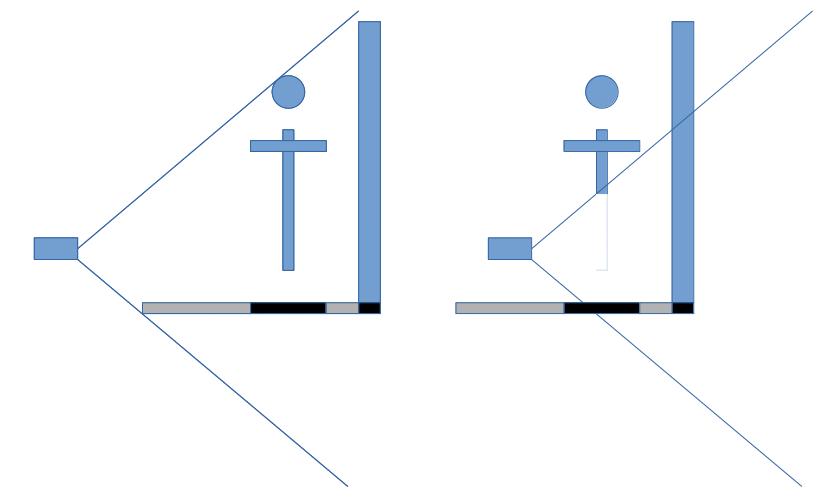
To clear obstacles with ray tracing, when the object is not there anymore, the camera/lidar should "see" ground or obstacle behind the occupied cells to clear them, so that ray tracing can ray cast through those occupied cells and change their occupation probability. In your environment:
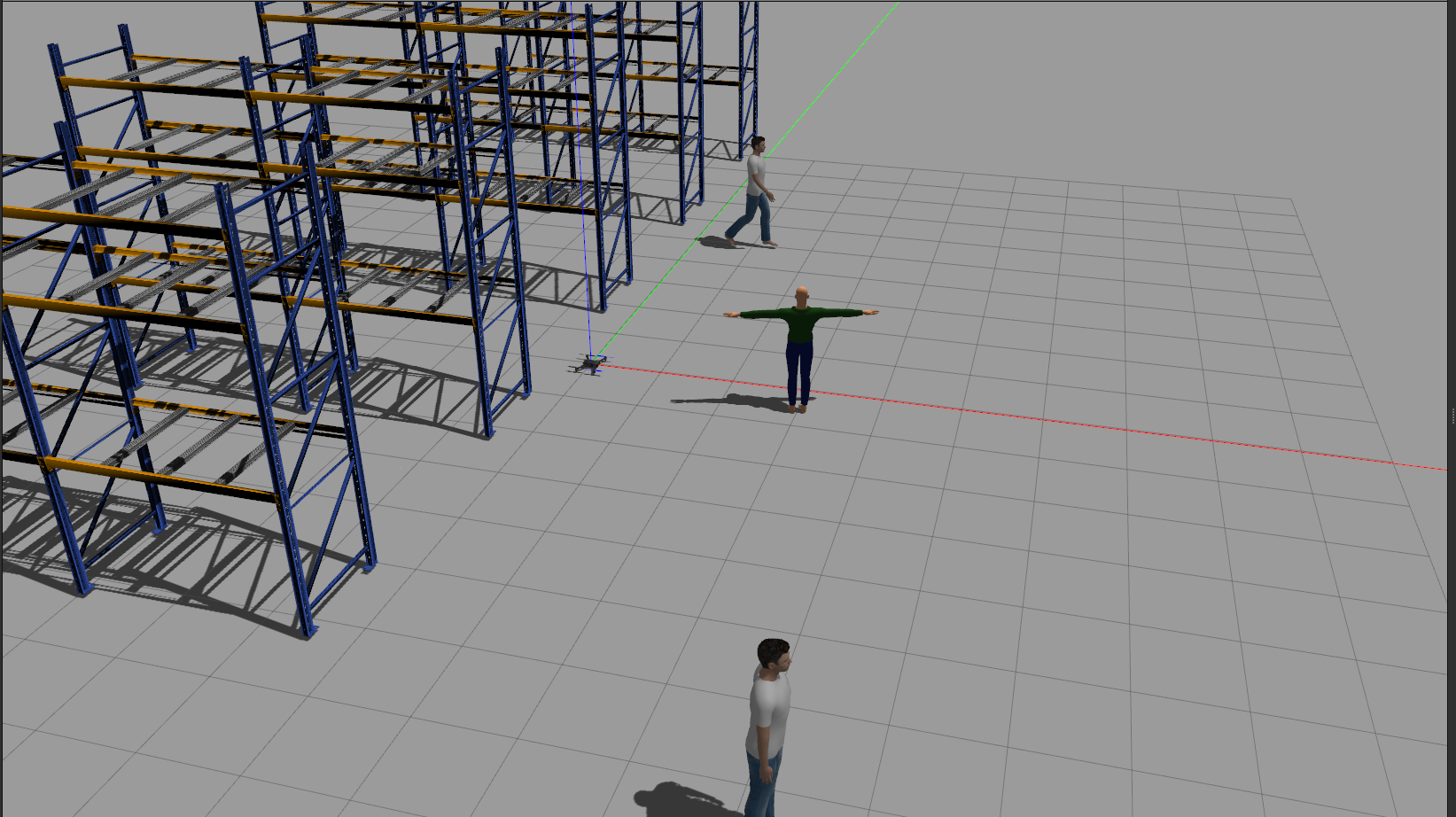
there are no walls, so if some occupied cells are added 1 meter over the ground and the npc move, there only emptiness behind the occupied cells, so they are likely to stay there.