Hi,
You cannot show on the same graph Odometry statistics with statistics from other panels as they are not published at the same rate. There is an opened issue
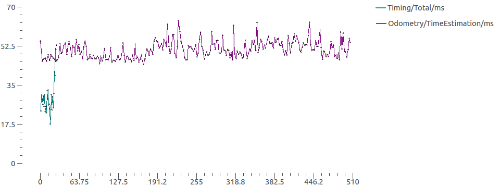
here to be able to set x-axis as time instead of sequence number. If your detection rate is 1 Hz, then "Timing/Total/ms" x-axis values are seconds. However for odometry, there is no direct relation between sequence number and time.
Odometry is running as fast as possible (according to input source rate), and in your case at an average of ~50 ms. So the maximum FPS for odometry on your machine is ~1000/50 = ~20 Hz. This would use 100% CPU of a core if camera input rate is equal or higher than 20 Hz (you could have 50% CPU usage if input rate is 10 Hz for another example).
For the mapping update rate, it is fixed by "Rtabmap/DetectionRate" parameter (default 1000 ms or 1 Hz). In your case, you have between 20 ms to 35 ms update time, it means that you are using 2% to 3.5% CPU of a core to update the map.
In summary:
- FPS mapping update is 1 Hz
- FPS odometry update is ~20 Hz
cheers