Hi,
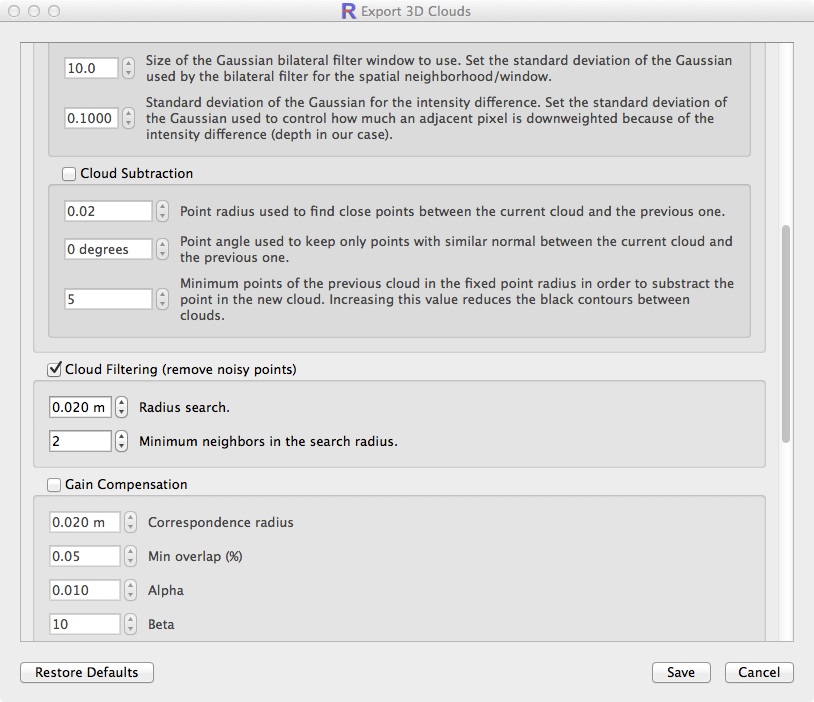
If it is a point cloud exported from rtabmap UI, yes there is a radius filter that can be set (see Cloud Filtering in Export dialog):
For the map shown in 3D View, the parameters are in Preferences->3D Rendering.
On ROS with /rtabmap/cloud_map topic, we can use "Grid/NoiseFilteringRadius" and "Grid/NoiseFilteringMinNeighbors":
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap">
[...]
<param name="Grid/NoiseFilteringRadius" type="string" value="0.05"/>
<param name="Grid/NoiseFilteringMinNeighbors" type="string" value="5"/>
</node>
cheers

