Hello,
After bringing up turtlebot with rtabmap:
$ roslaunch turtlebot_bringup minimal.launch
$ roslaunch rtabmap_ros demo_turtlebot_mapping.launch
$ roslaunch rtabmap_ros demo_turtlebot_rviz.launch
normally, you only have to "drop" a navigation goal on the map with RVIZ to see the robot moving autonomously to it. click on "2D Nav Goal" button in RVIZ to set a goal.
You should see a planned path (red line) like this to the goal set (green arrow):
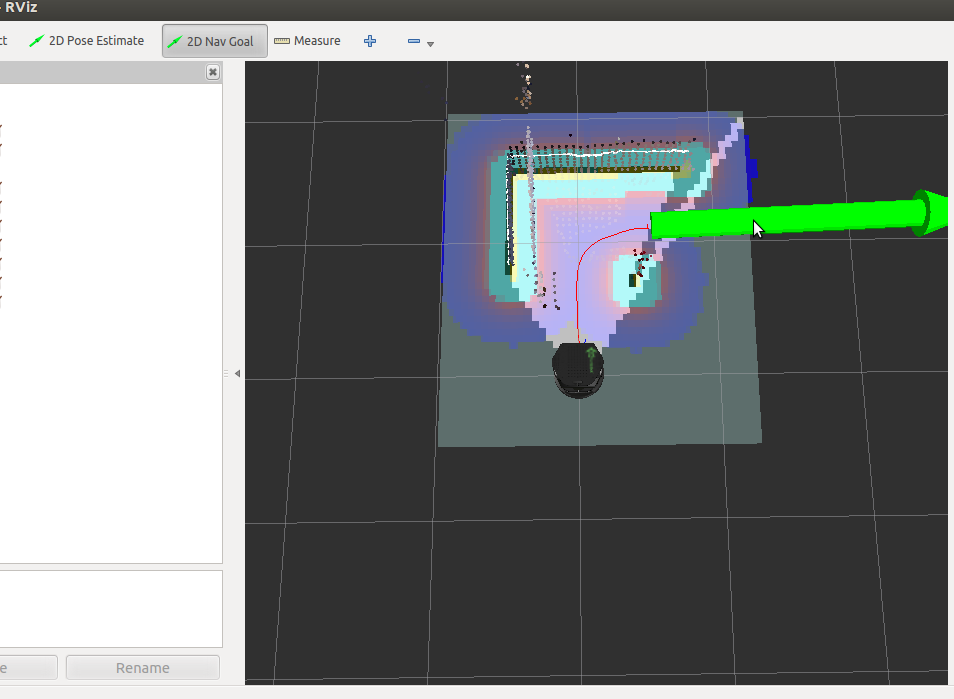
The commands sent by
move_base:
$ rostopic echo /mobile_base/commands/velocity
cheers,
Mathieu

