Hello.
I am mapping with RTAB-Map, I save the map in 2D with
rosrun map_server map_saver -f my_map_1 map:=/rtabmap/proj_map.After complete mapping, I perform localization
rosrun realsense2_camera opensource_tracking_tk_localization.launch
Now, I am implementing a path planning algorithm, and I need to get
the robot location in (x, y) coordinates within the map. Also, where the
origin of the map is into a grid of cells, and
the actual width of the map created.
I want to know
if I must subscribe to some topic and get the information I need for the path planning, in this case I am using the A* algorithm with inputs like start node and goal node.
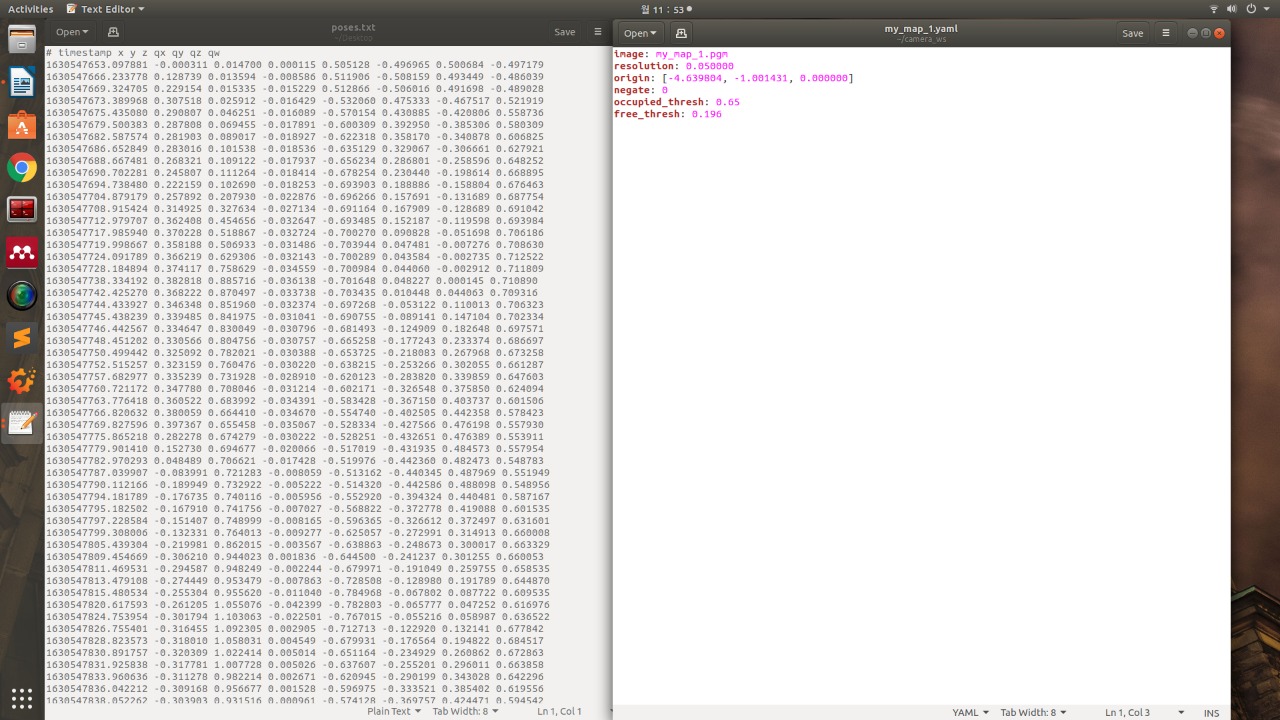
This is the .yaml file and the poses.txt file that I have obtained.
Ubuntu 18.04
D435 Realsense camera