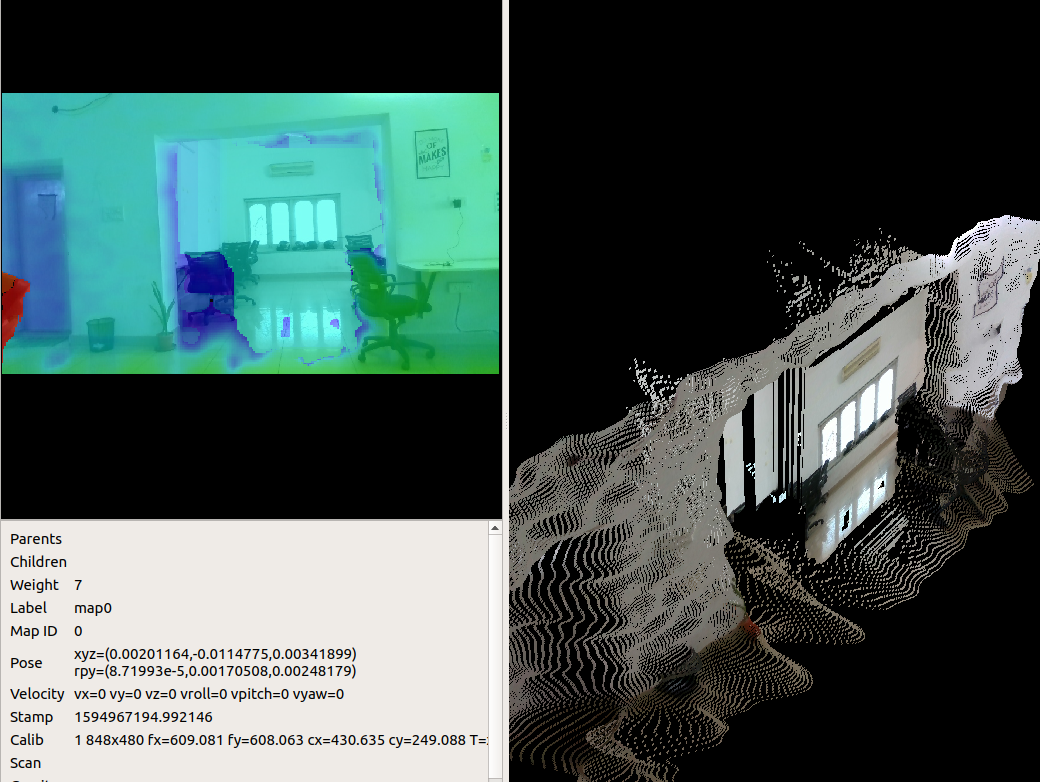
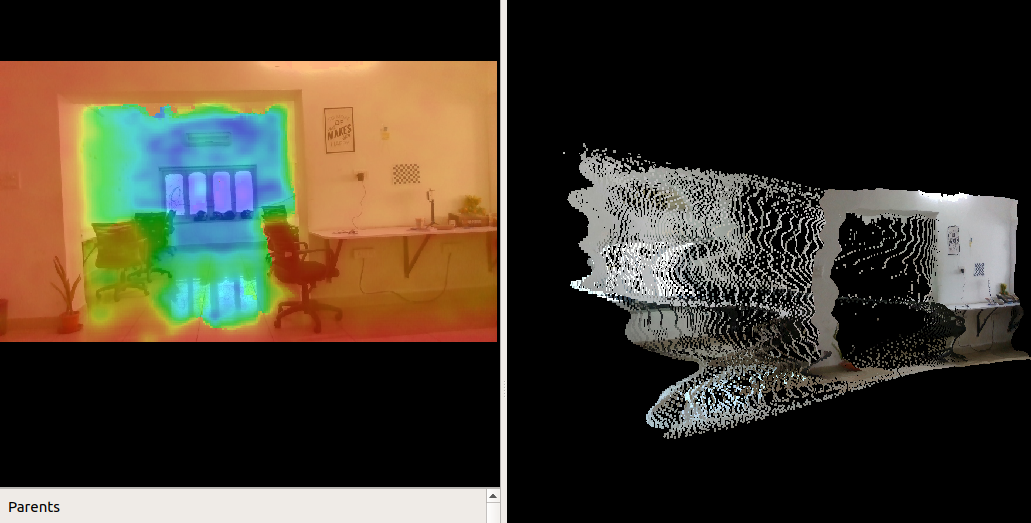
How to discard RGB information which doesn't have a valid Depth information?

How to discard RGB information which doesn't have a valid Depth information?

|
Re: How to discard RGB information which doesn't have a valid Depth information?
|
Administrator
|
Re: How to discard RGB information which doesn't have a valid Depth information?
|
|
Re: How to discard RGB information which doesn't have a valid Depth information?
|
Administrator
|
| Free forum by Nabble | Edit this page |