Hi matlabbe,
Thank you for your answer.
By applying the patch you gave me, the error did not appear.
I'm really grateful for your help.
However, I am concerned about follows behavior.
The following is the execution procedure.
Terminal 1
roslaunch realsense2_camera rs_aligned_depth.launch
Terminal 2
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="-delete_db_on_start" depth_topic:=/ camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info
The console on terminal 2 will display a message as updated on ORB-SLAM2 as shown below.
[INFO] [1558421434.471534613]: Update odorometry parameter "Odom / Strategy" = "5" from arguments
[INFO] [1558421434.471685077]: Update odorometry parameter "OdomORBSLAM2 / VocPath" = "/ home / koba / ros_dev / ORB_SLAM2 / Vocabulary / ORBvoc.txt" from arguments
[WARN] (2019-05-21 15: 50: 34.900) OdometryORBSLAM2.cpp: 557 :: ORBSLAM2System () Loading ORB Vocabulary: "/home/koba/ros_dev/ORB_SLAM2/Vocabulary/ORBvoc.txt". This could take a while ...
[INFO] [1558421435.353893611]: Reading parameters from the ROS server ...
[INFO] [1558421435.472238449]: Update RTAB-Map parameter "Odom / Strategy" = "5" from arguments
[INFO] [1558421435.472295781]: Update RTAB-Map parameter "OdomORBSLAM2 / VocPath" = "/ home / koba / ros_dev / ORB_SLAM2 / Vocabulary / ORBvoc.txt" from arguments
When I display the Preferences screen of RTAB-Map, Odometry strategy is set to "Frame to Map".
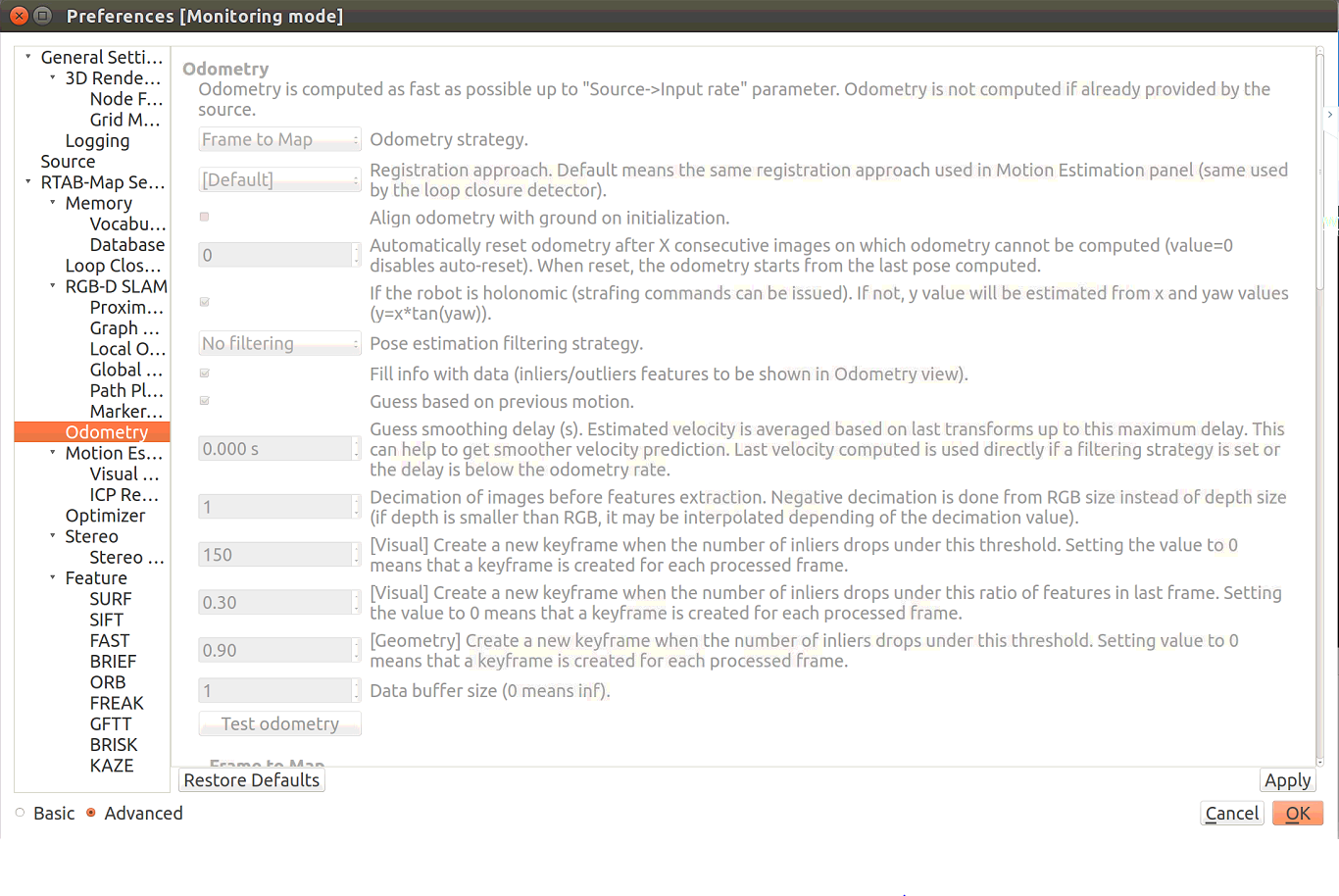
Please tell me what kind of cause is considered?
Many Thanks,
koba