Hi, everybody.
I have a question. I took a 3D map of about 150m long corridor.
Then, the corridor is distorted like this image.
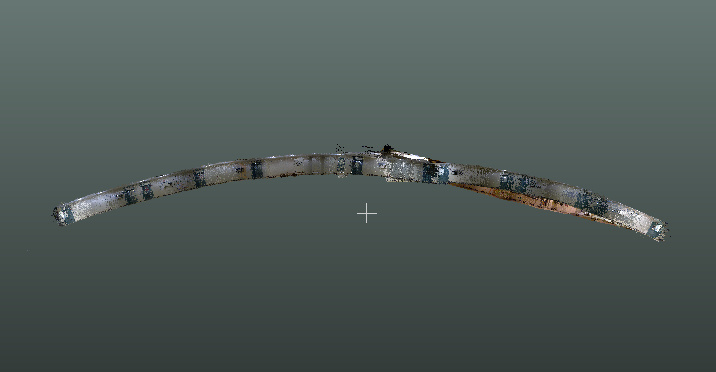
I don't understand why does it happen.
I have read
https://github.com/introlab/rtabmap/wiki/Depth-Calibration page and I've tried it.
But in stand alone rtabmap for LINUX, I thought online Depth-Calibration is not implemented.
Please tell me why does it distort if you don't mind.
And I'd like to know how to fix this distortion.
I use Kinect v1 with wheelchair.

Sorry for my poor English.
Thanks!

