Hi,
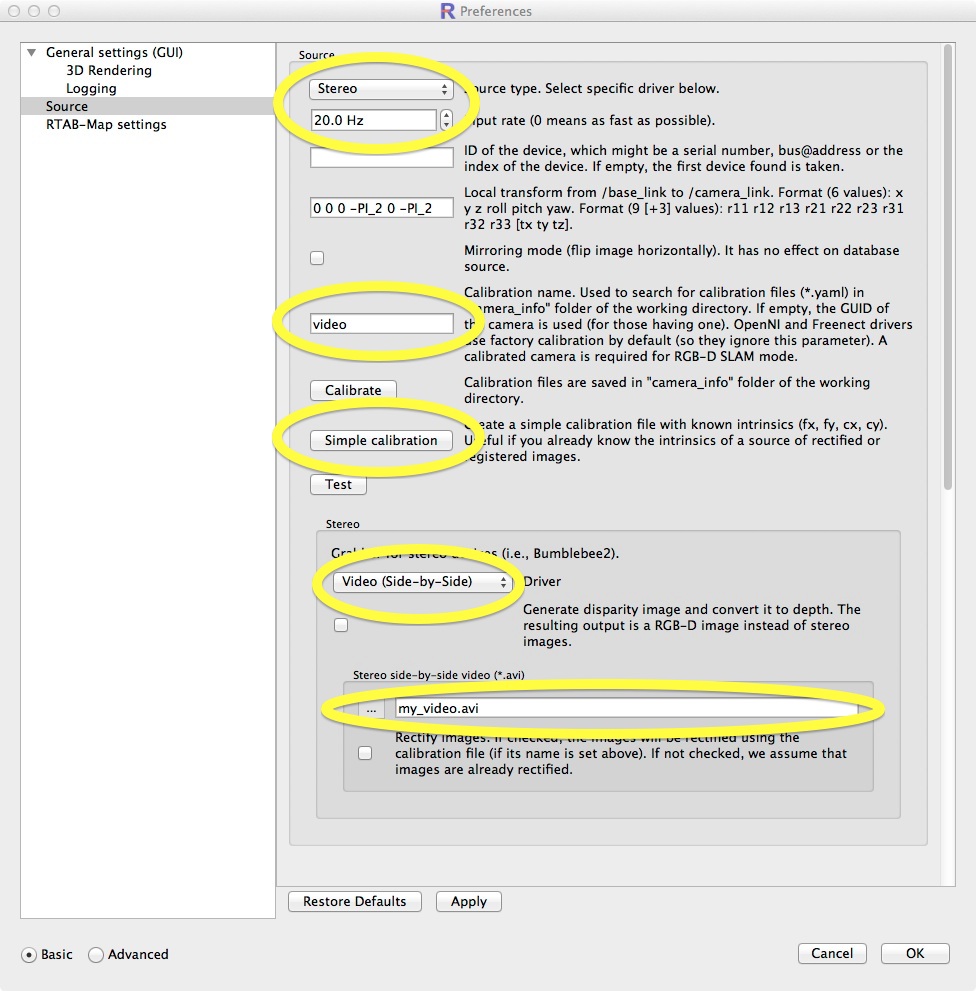
You can guess the camera parameters. If the images have no distortions (they are rectified), you can use the "Simple calibration" button to generate calibration file for you.
In the example below, we are creating a calibration file named "video". By clicking "Simple calibration", set these parameters:
fx = 525
fy = 525
cx = 0
cy = 0
baseline = 0.11
These parameters are from the Bumblebee2 camera calibration. You may need to tune the focal and baseline depending on the simulated stereo camera. For virtual reality, the baseline may be
between 50–75 mm (so 0.05-0.075 m).
This will save the calibration files to working directory. When starting mapping, RTAB-Map looks in the "camera_info" folder for files named with "video" prefix.
cheers

