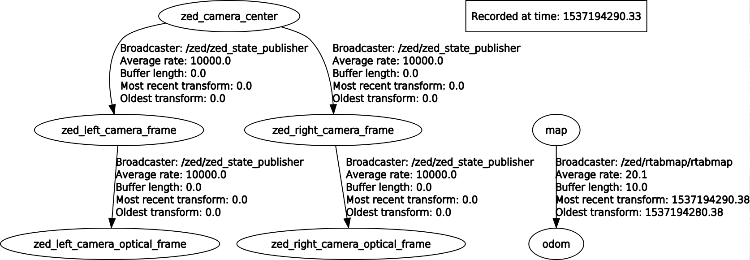
I checked again on my system and I did reproduced the problem. In latest zed_ros_wrapper version, they do also localization when odometry is used, causing a /map -> /odom frame also published by zed wrapper along the /odom -> zed_camera_center. There is no way to disable this by parameters and use only odometry. We have to comment this
line in zed wrapper to avoid publishing /map -> /odom when we do the example "
B) With zed odometry" on this
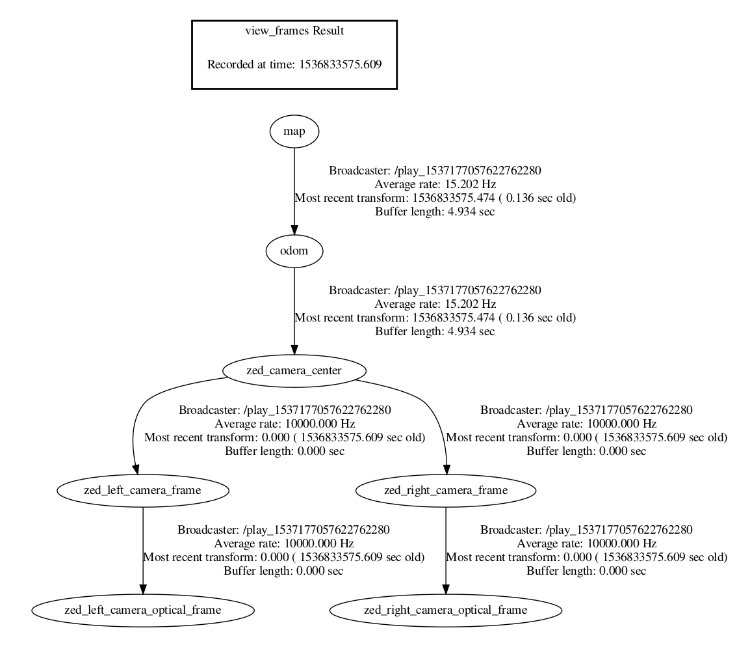
tutorial. I updated the wiki for this issue. You should have afterward this TF tree instead:

The example "
A) With rtabmap odometry" should work as expected. rtabmap will publish /map -> /odom and rgbd_odometry will publish /odom->/zed_camera_center.
cheers,
Mathieu