Hi
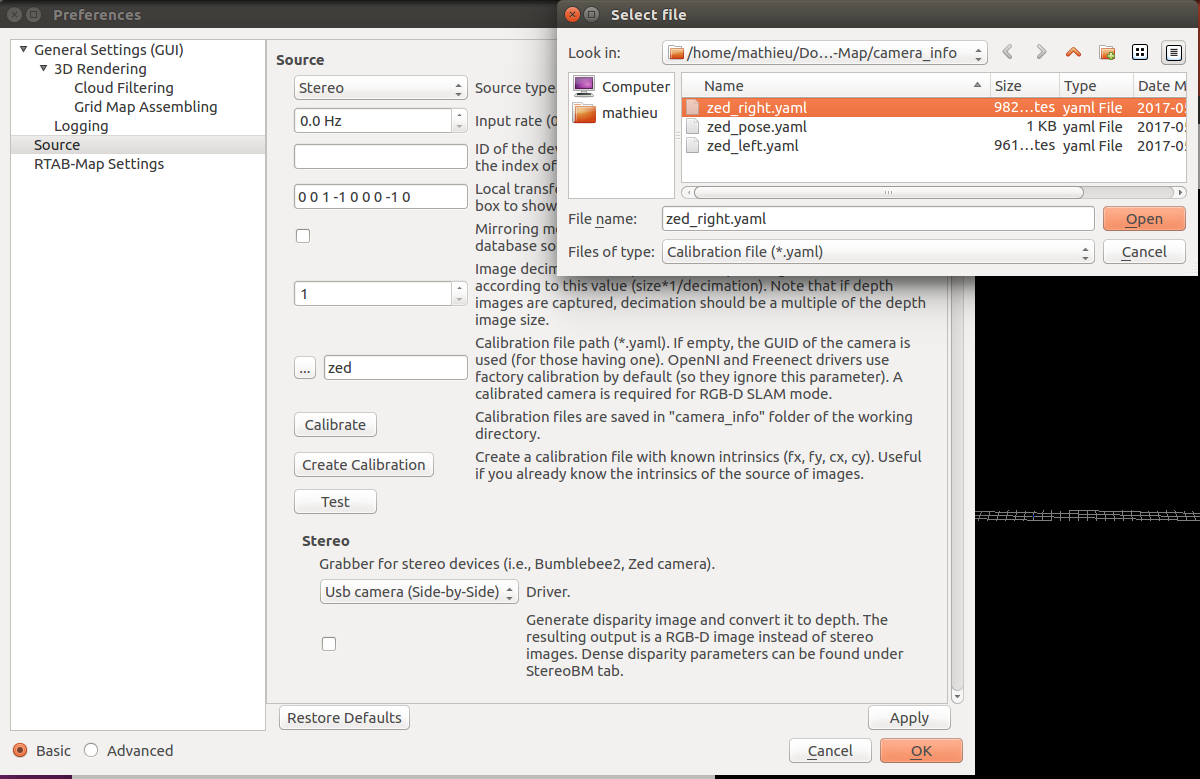
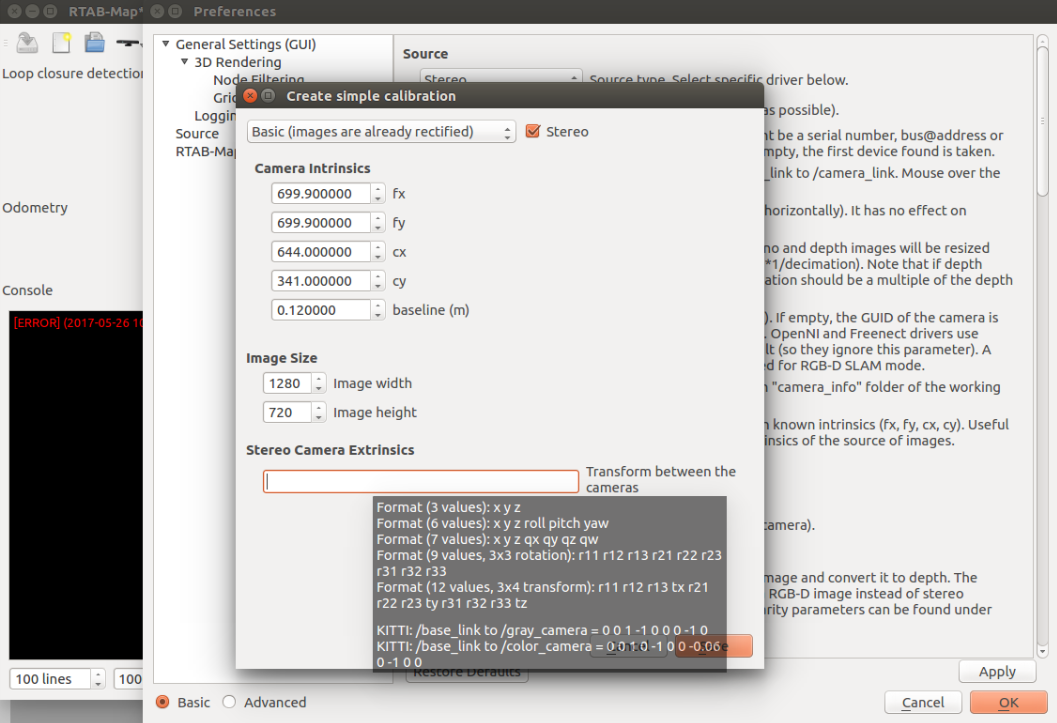
I finally realize the function of running the ZED camera in real time with RTAB-MAP with your help. Thank you very much.
At last, I have a proposal for the Stereo Hand-Held Mapping
wiki.ros.org/rtabmap_ros/Tutorials/StereoHandHeldMapping.
When we want to display the output of the ZED camera in RVIZ, the instruction of the website is
"
roslaunch rtabmap_ros stereo_mapping.launch stereo_namespace:="/stereo_camera" rtabmap_args:="--delete_db_on_start" rviz:=true rtabmapviz:=false".
But if we implement this order, the rviz can not subscribe necessary messages.
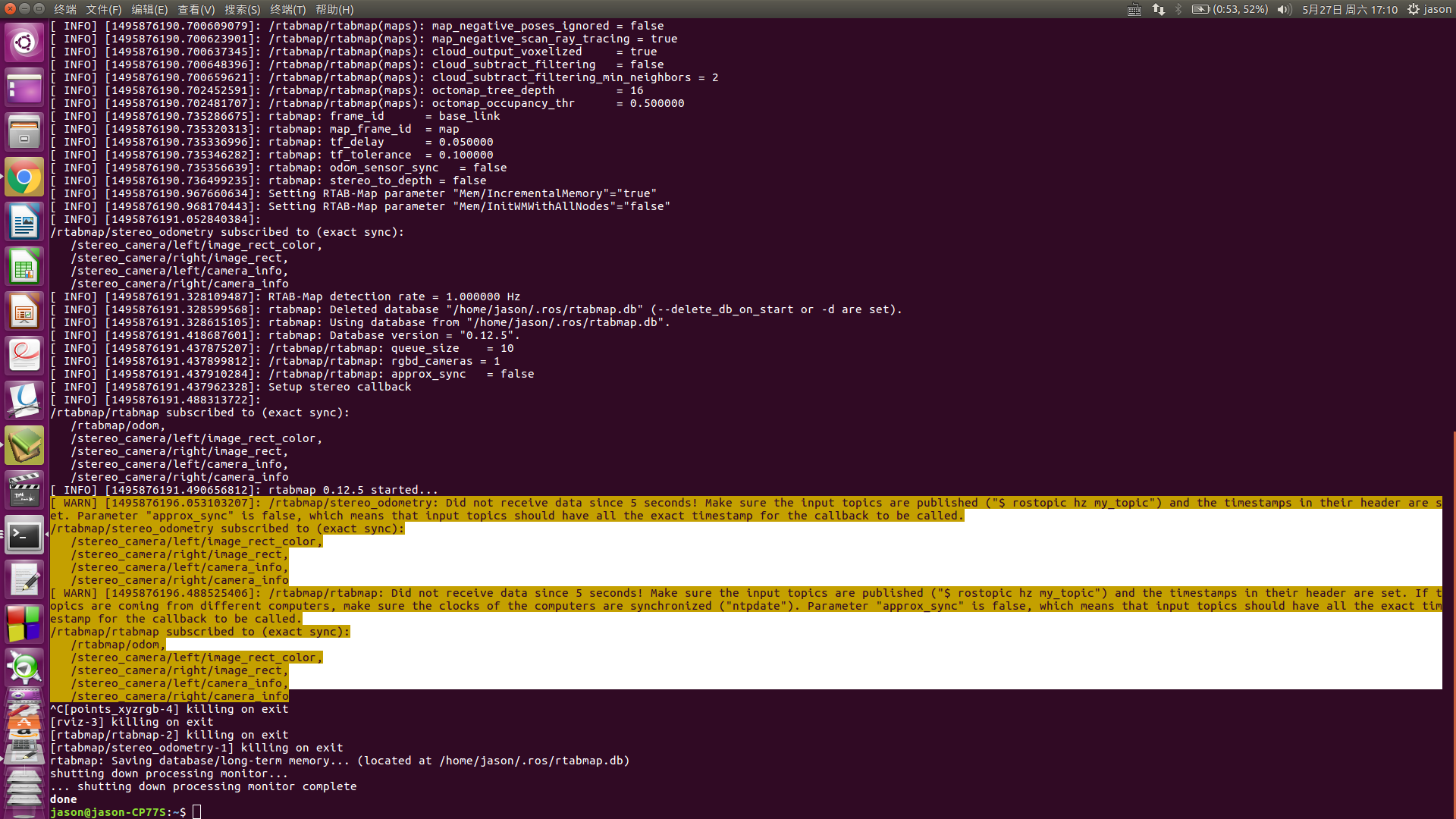
I think we should implement the order of
"
roslaunch rtabmap_ros stereo_mapping.launch stereo_namespace:="/camera" right_image_topic:=/camera/right/image_rect_color frame_id:=camera_link rtabmap_args:="--delete_db_on_start" rviz:=true rtabmapviz:=false" instead of the former, after implementing the two "tf" orders.
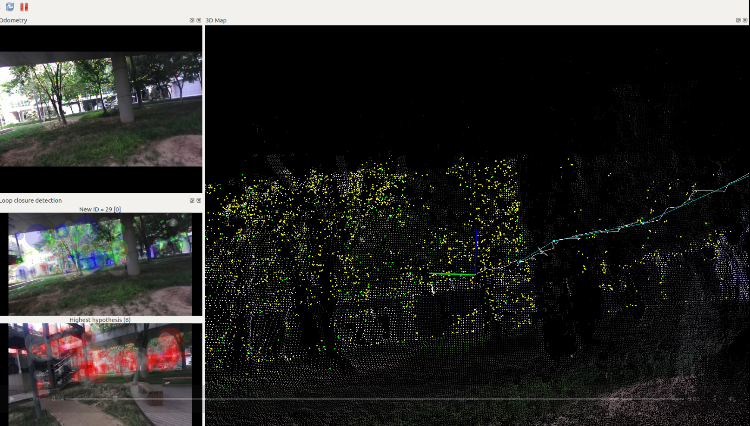
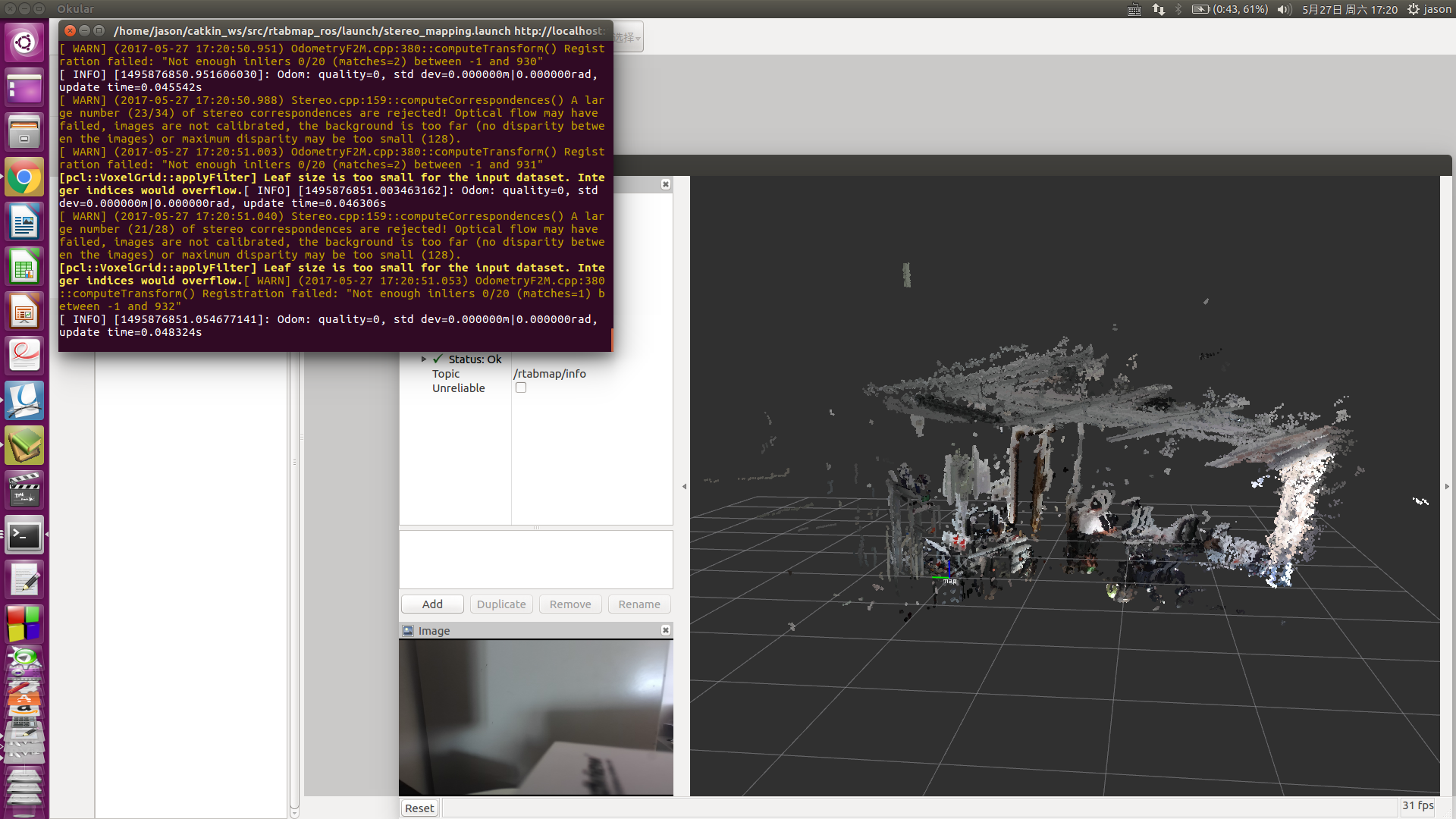
Then we can see the output of RTABMAP with rviz
Thank you again! Best Wishes!
Jason Wong