I followed the tutorials I collected online to build the environment for RTABMAP with ORBSLAM3
but, an error occurs when the following command is printed
roslaunch rtabmap_ros euroc_datasets.launch args:="Odom/Strategy 5 OdomORBSLAM3/VocPath /home/rosadmin/rtab_ws/src/ORB_SLAM3/Vocabulary/ORBvoc.txt" MH_seq:=true raw_images_for_odom:=truerosbag play --clock V1_01_easy.bag OdometryORBSLAM.cpp:1163::computeTransform() RTAB-MAP is not built with ORB_SLAM support!Select another visual odometry approach.
OdometryORBSLAM.cpp:1163::computeTransform() RTAB-MAP is not built with ORB_SLAM support!Select another visual odometry approach.My procedure is as follows
1. Install ORBSLAM3
git clone -b v0.4-beta
https://github.com/UZ-SLAMLab/ORB_SLAM3.gitcd ORB_SLAM3/
wget
https://gist.githubusercontent.com/matlabbe/f5cb281304a1305b2824a6ce19792e13/raw/f8bbc796edc29b9f815cbf3c99a0c3e13e23663d/orbslam3_v4_rtabmap_fix.patchgit apply orbslam3_v4_rtabmap_fix.patch
./build.sh
2. Configure the environment
sudo gedit ~/.bashrc
export ORB_SLAM_ROOT_DIR=/home/rosadmin/rtab_ws/src/ORB_SLAM3
source ~/.bashrc
3. Install RTABMAP
cd ~/softwares/
git clone
https://github.com/introlab/rtabmap.gitcd rtabmap/build/
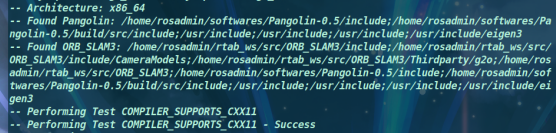
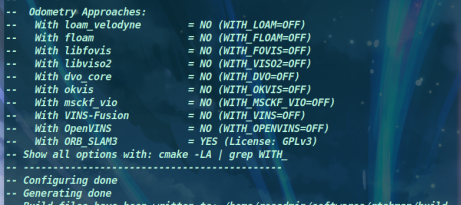
cmake -DWITH_G2O=OFF -DWITH_ORB_SLAM=ON ..
make -j4
4. Install RTABMAP_ROS
cd ~/rtab_ws/src/
git clone
https://github.com/introlab/rtabmap_ros.git rtabmap_ros
cd ..
catkin_make -j4
My ubuntu version is 18.04, ROS-melodic
I am a novice and this problem has bothered me for a long time
how should this problem be solved,thank you

