Thank you so much for the reply. I tried to implement the solution that u proposed, and while doing so I bumped into some more issues which are as follows:
1. First, I tried multisession mapping
This command doesn't work
rtabmap-reprocess "map1.db; map2.db; map3.db" merged.db It returns an error saying......"Input database "map1.db; map2.db; map3.db" doesn't exist!", though it is a minute bug I think it is worth looking into this
But, I followed your tutorial on multi-session mapping and was able to generate a multi-session map, Yet, there are
some issues such as:
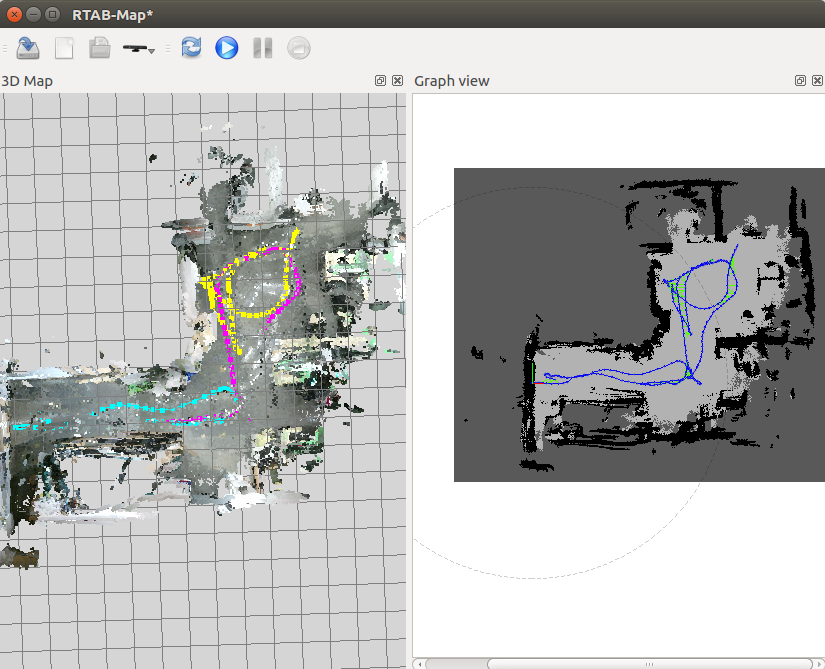
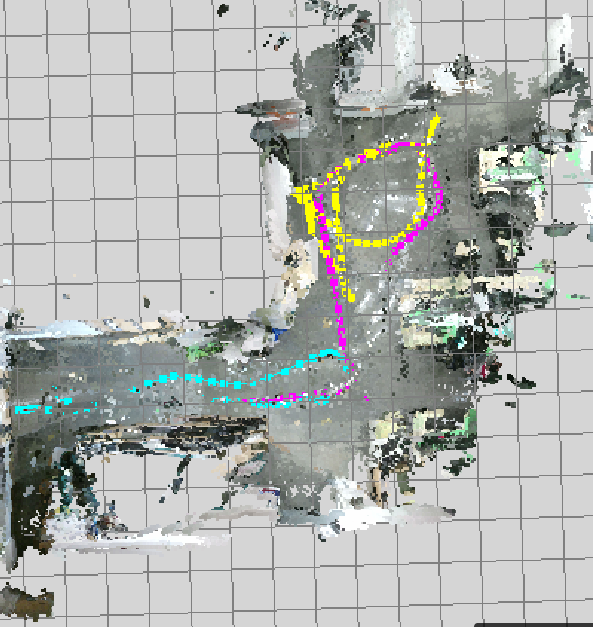
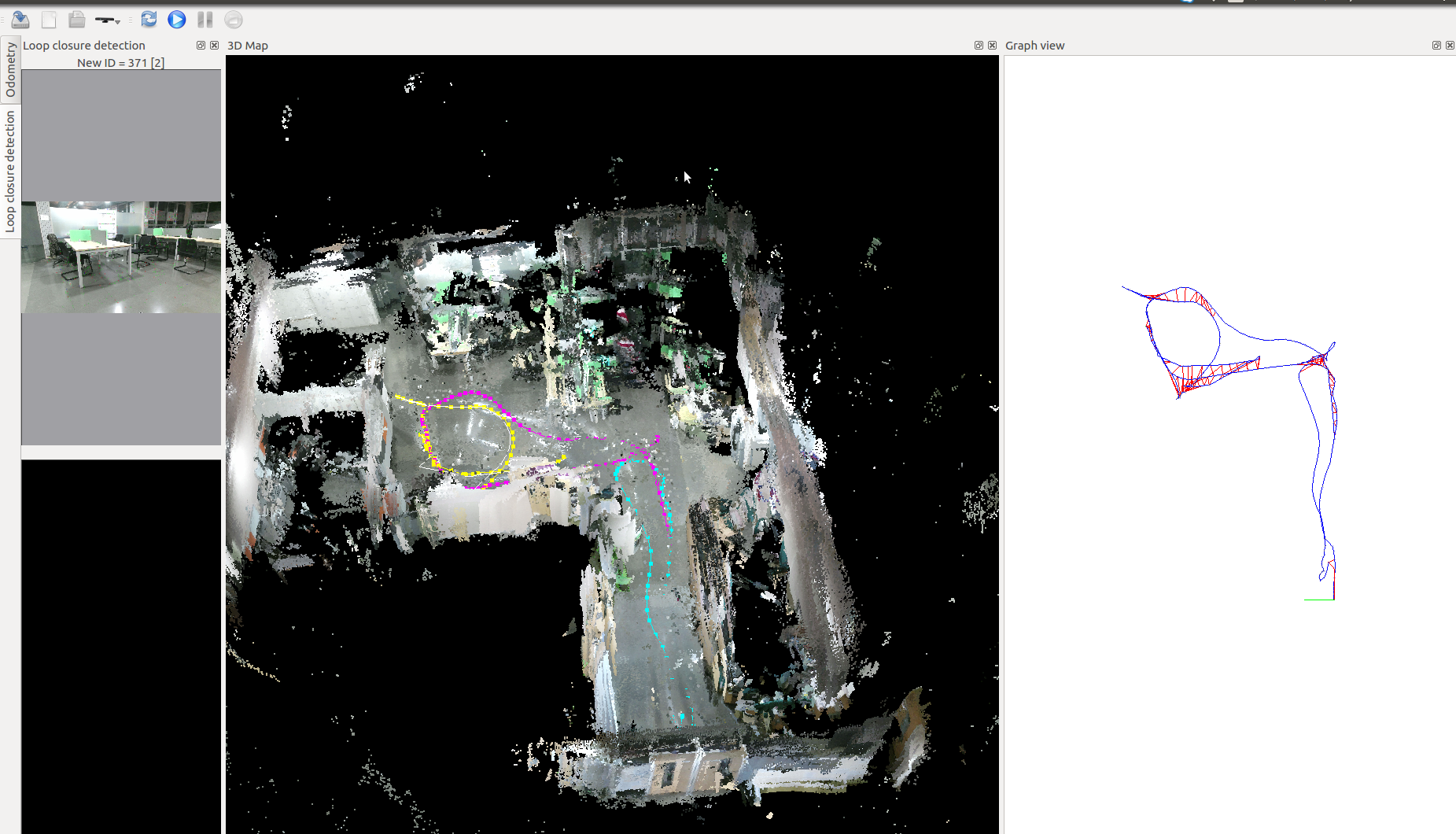
i) after merging the maps I was not able to get any graph view(2d map) from the merged .db file,
3D(left) and 2D(right) maps look something like this
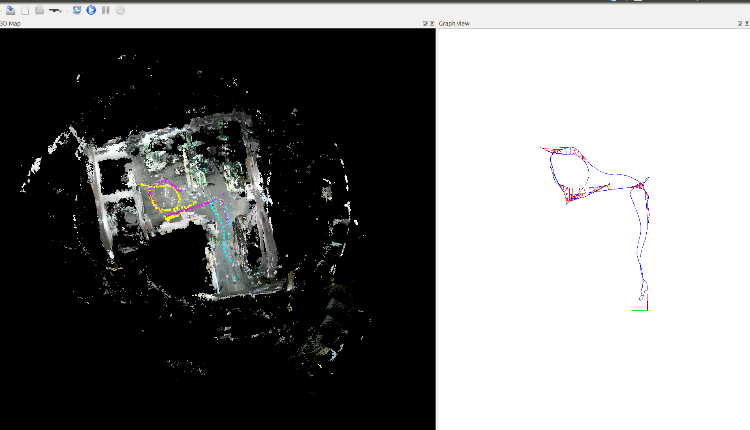
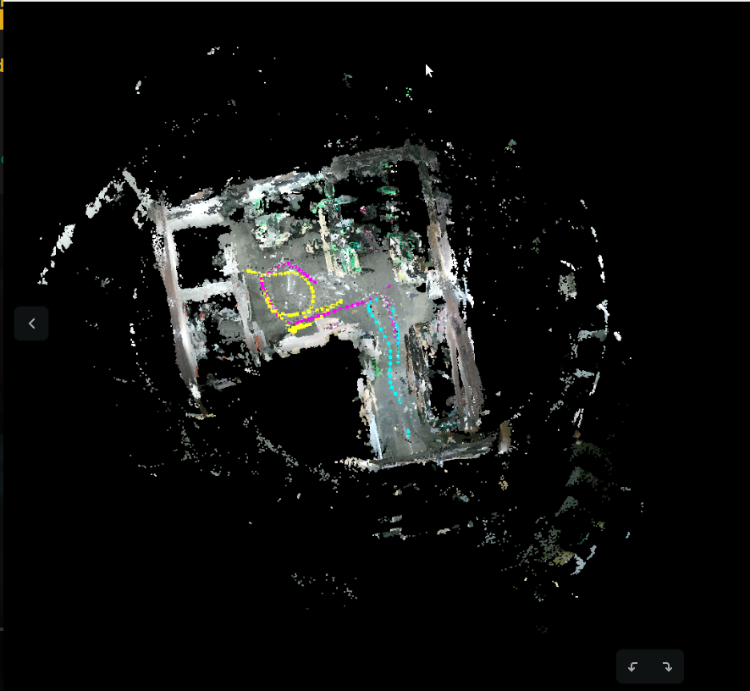
But in general, I find something like this
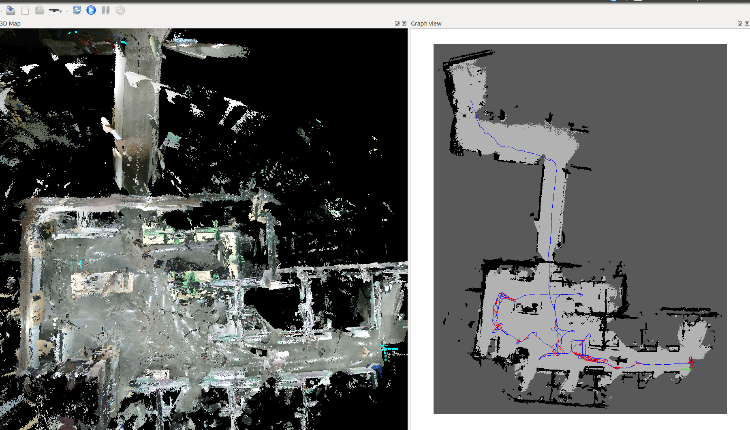
can you please comment on this?
ii) I wanted to save the database(.db) using the "Tools>DataRecorder" option, but it never saves anything, I dunno if this is actually the purpose of it but I felt like asking because it was saving only 30-50kB files
whenever I try to save a database after multisession or preprocessing.
It shows something like this:
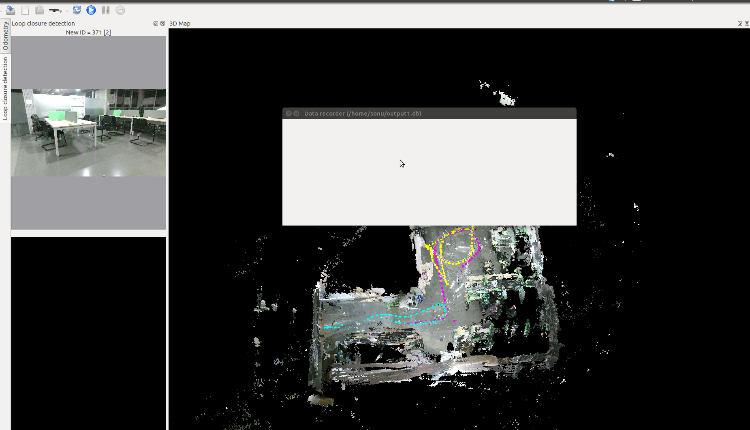
P.S: I know that when you choose the "close database" option, it prompts for saving the current progress. But, isn't the "Data recorder" option meant for saving our work whenever required?
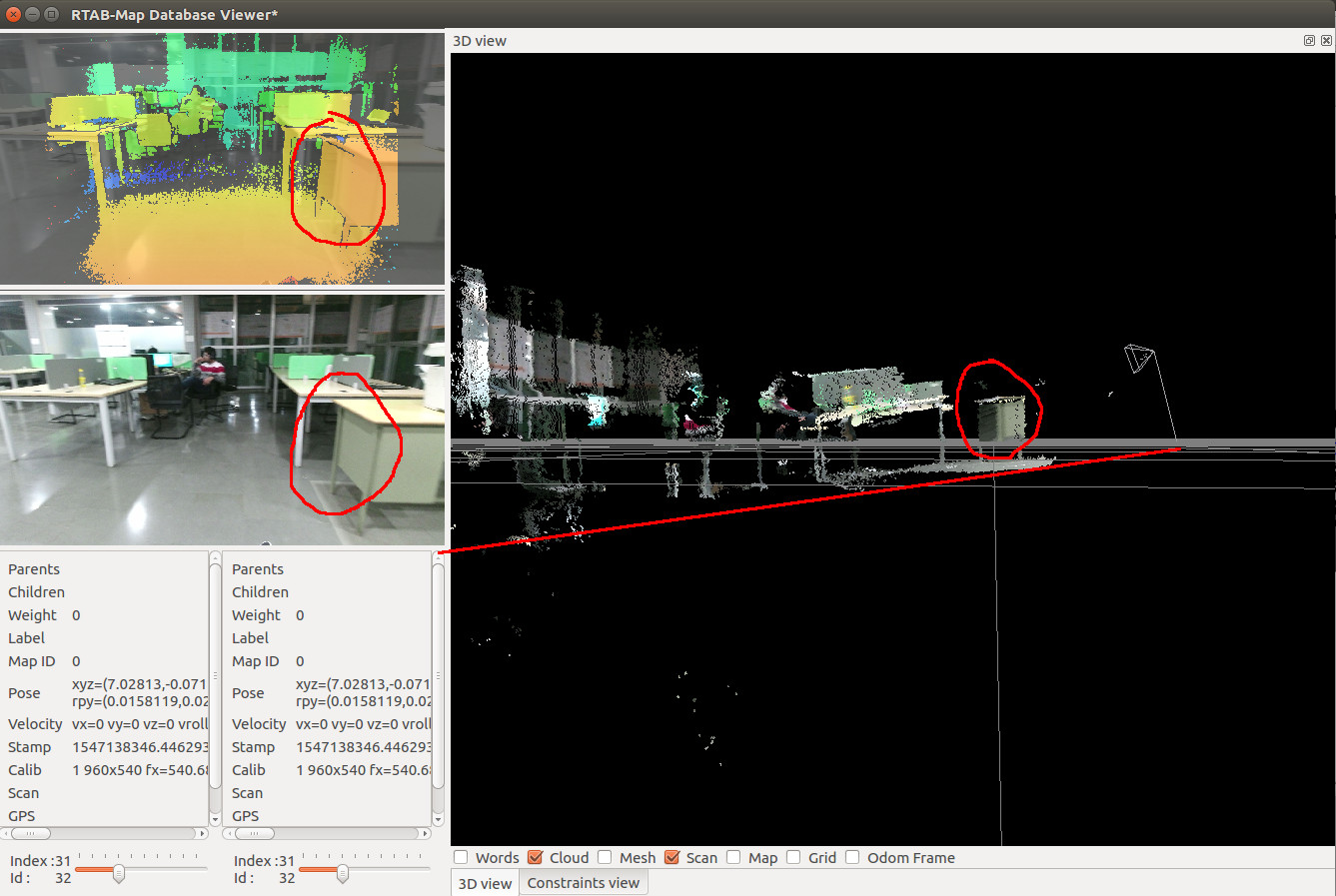
2. One more thing which might not be totally related to the illumination issue,
So, when I finish one of my mapping sessions and launch Rviz for navigation part, I see this kind of unnatural visualization in which the 3D pointcloud (3D map) is a certain angle w.r.t to 2D map. It looks like this
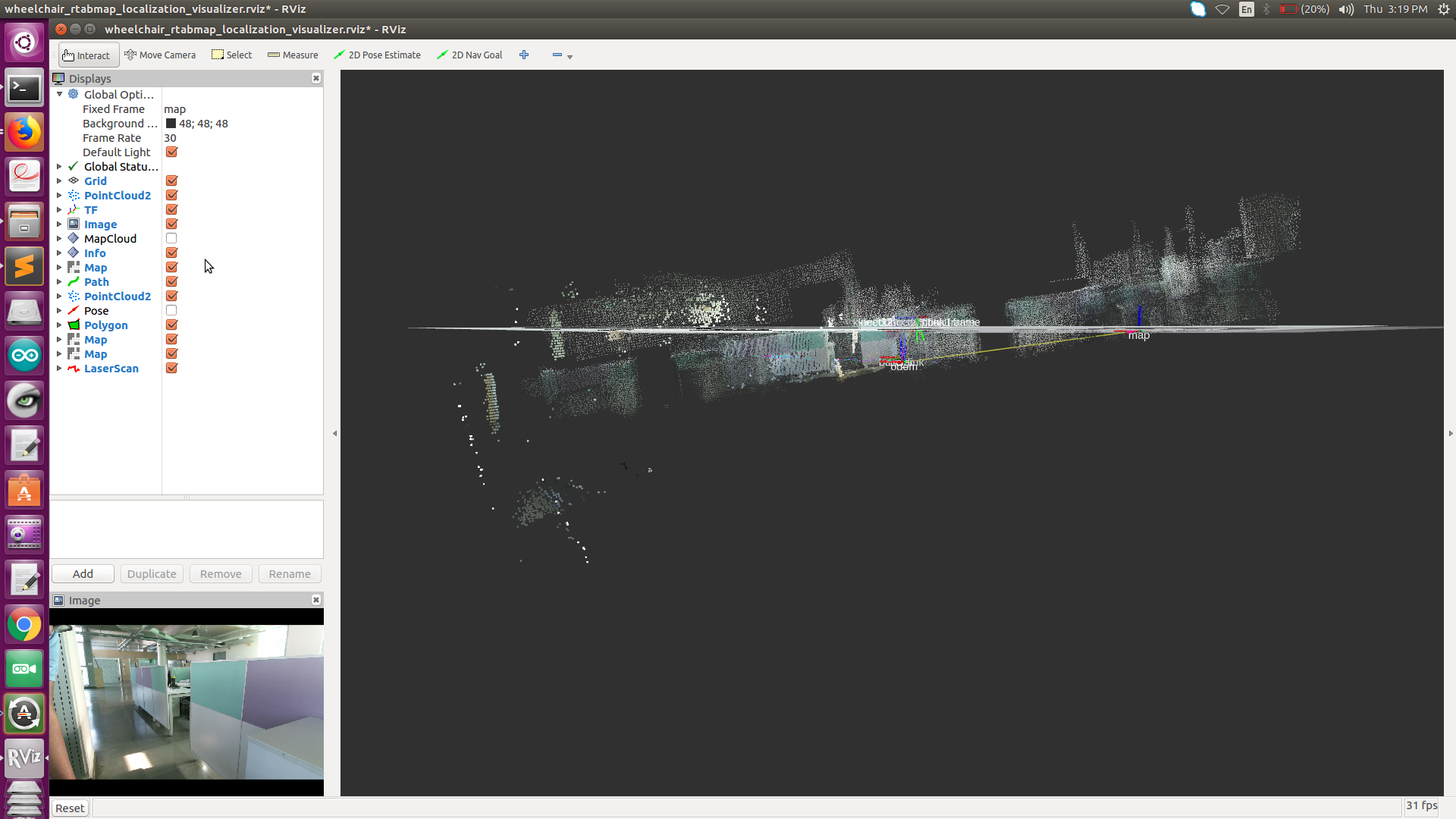
I dunno much if this is affecting my performance during navigation( I feel it is not) but it kind of looks strange when I try to see where the bot is moving because of the "half-submerged map" is this a problem related to TF ?
Thanks for your patience

.



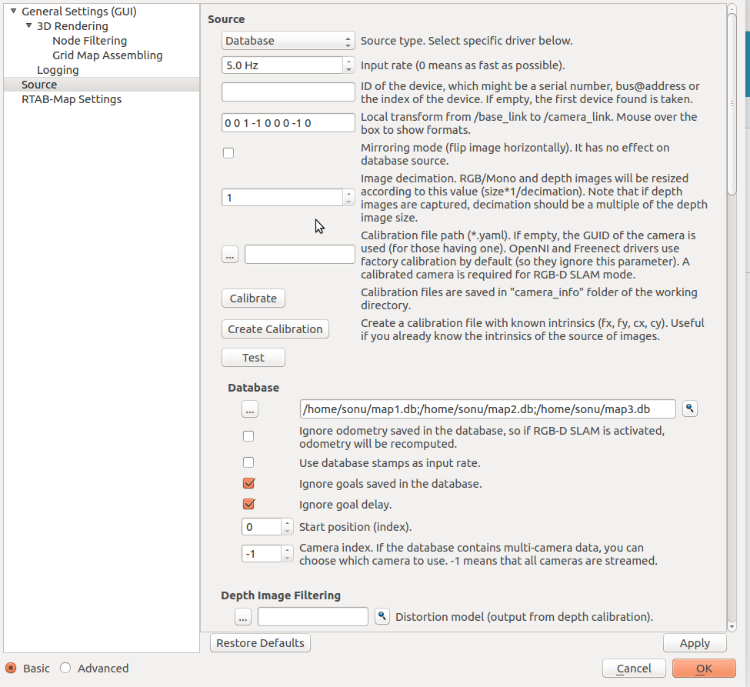
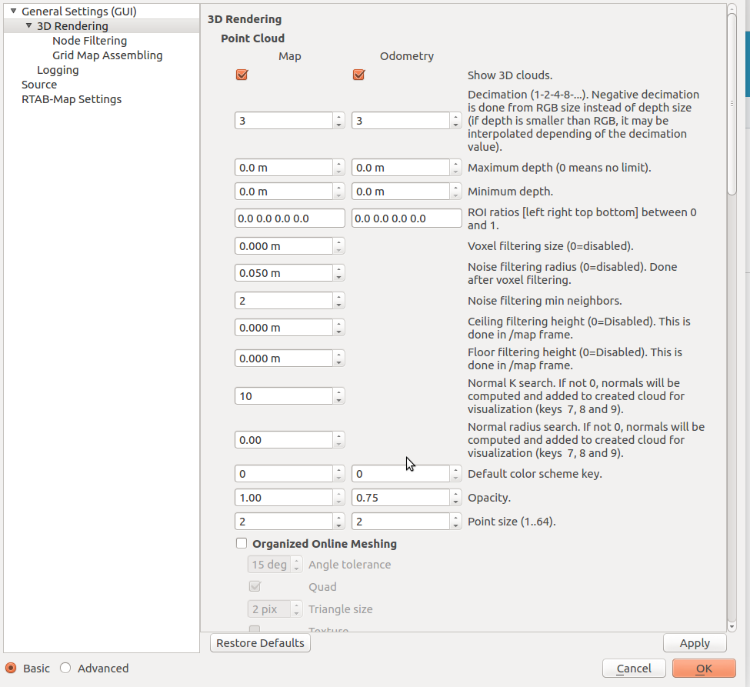
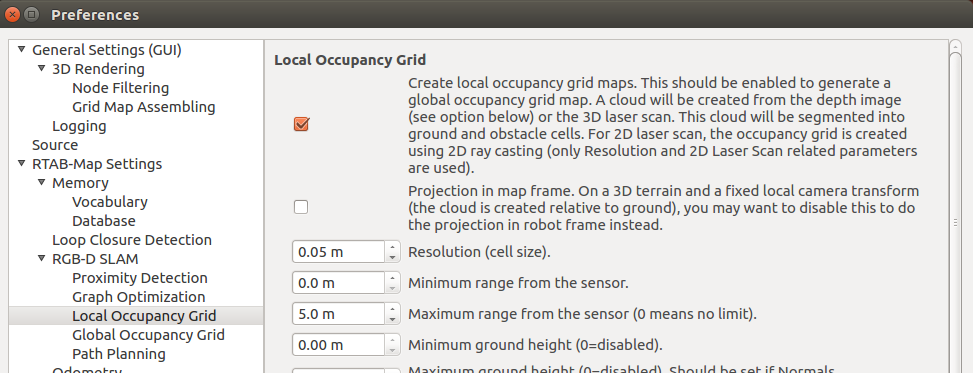
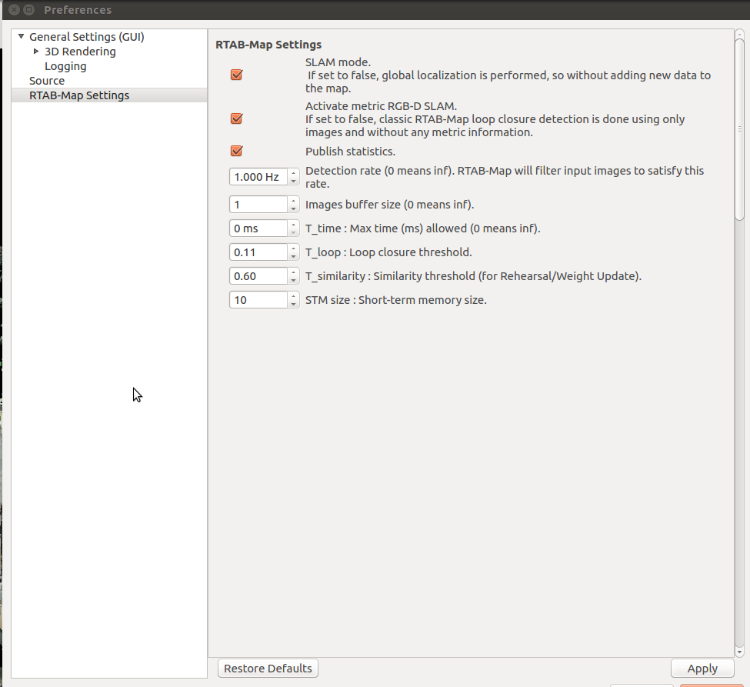
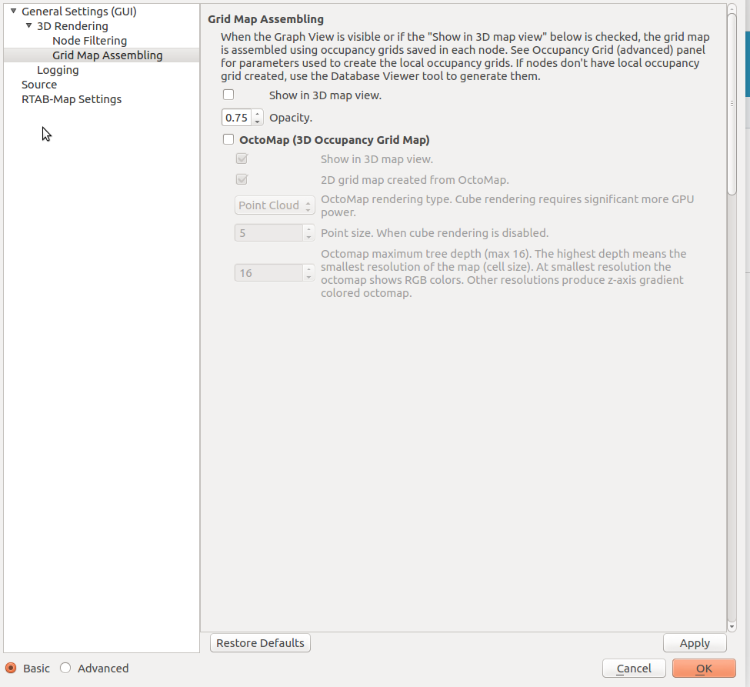 For the reference, here are my settings for multi-session mapping
For the reference, here are my settings for multi-session mapping