Hello everyone,
I'm currently working with RTAB-Map in ROS2 and facing issues with the accuracy of my generated map. My goal is to create a reliable map that allows localization in both directions of a building.
My Setup & Issue:
I recorded a long ROS bag in both directions of the building to ensure localization works from different approaches.
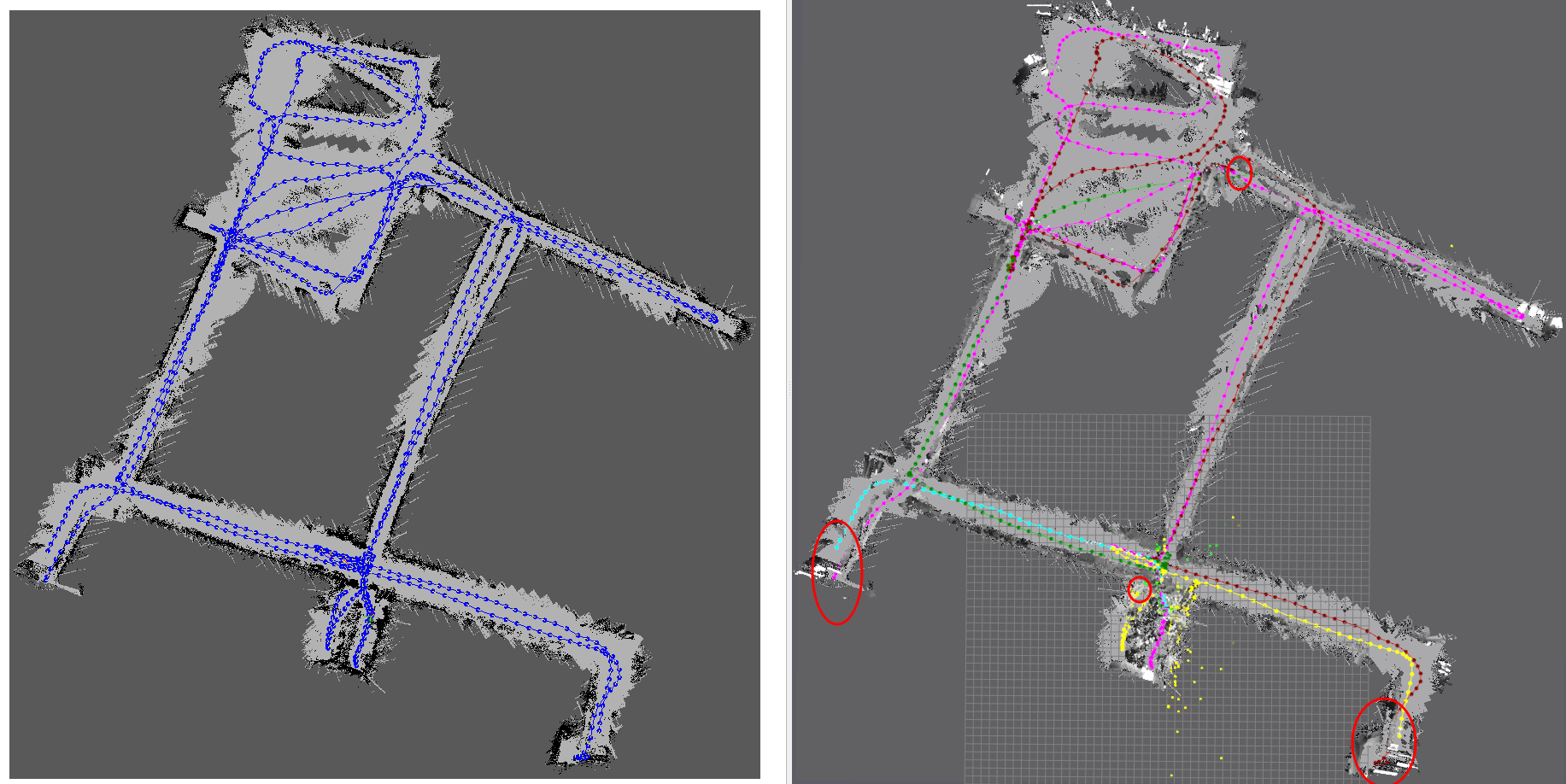
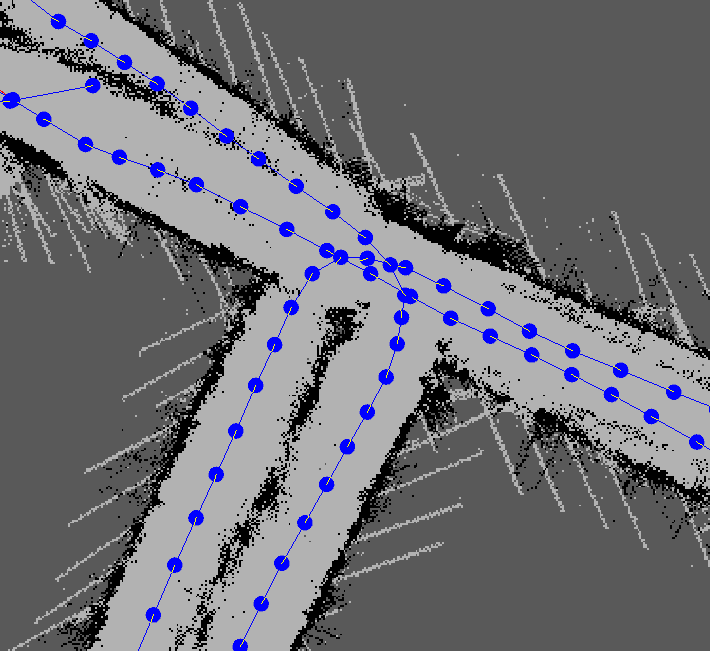
However, I am experiencing significant overlapping issues and poor alignment, leading to low mapping accuracy.
The generated map does not match the real structure well, making localization unreliable.
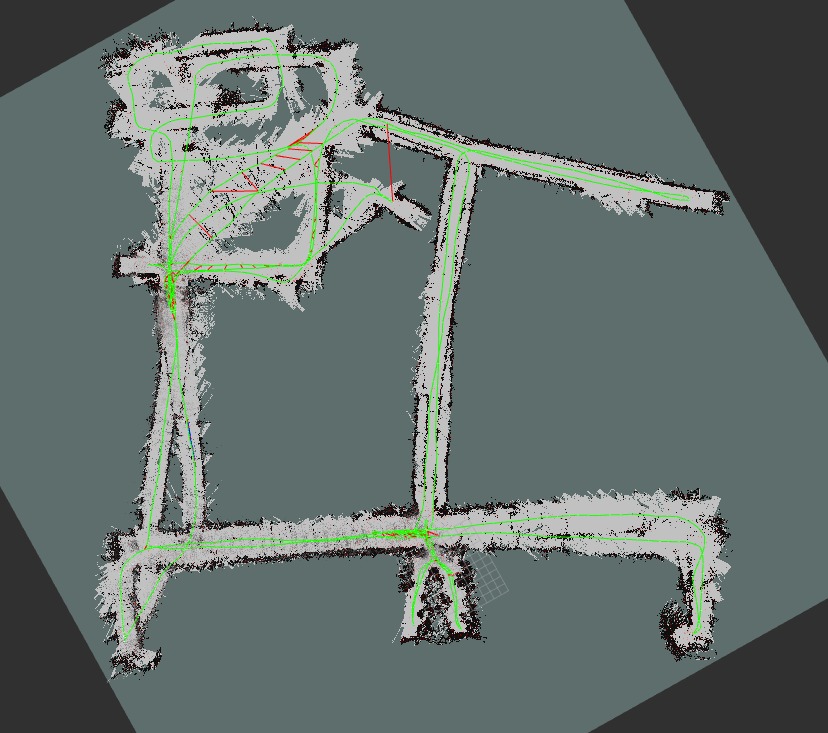
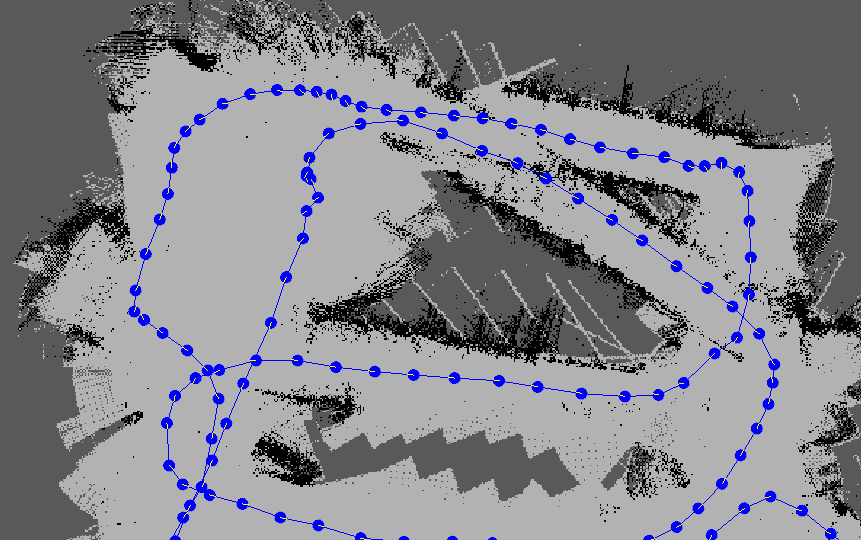
Unfortunately, my current mapping result (see attached image) is unsatisfactory, as it does not accurately reflect the building’s structure.
What I Need Help With:
Configuration Advice: If anyone has experience with RTAB-Map tuning, I would appreciate any suggestions on how to improve the map accuracy (e.g., parameter tuning, filtering, post-processing).
Mapping Assistance: If someone is willing to try and generate a better map using my recorded ROS bag data, I would be extremely grateful.
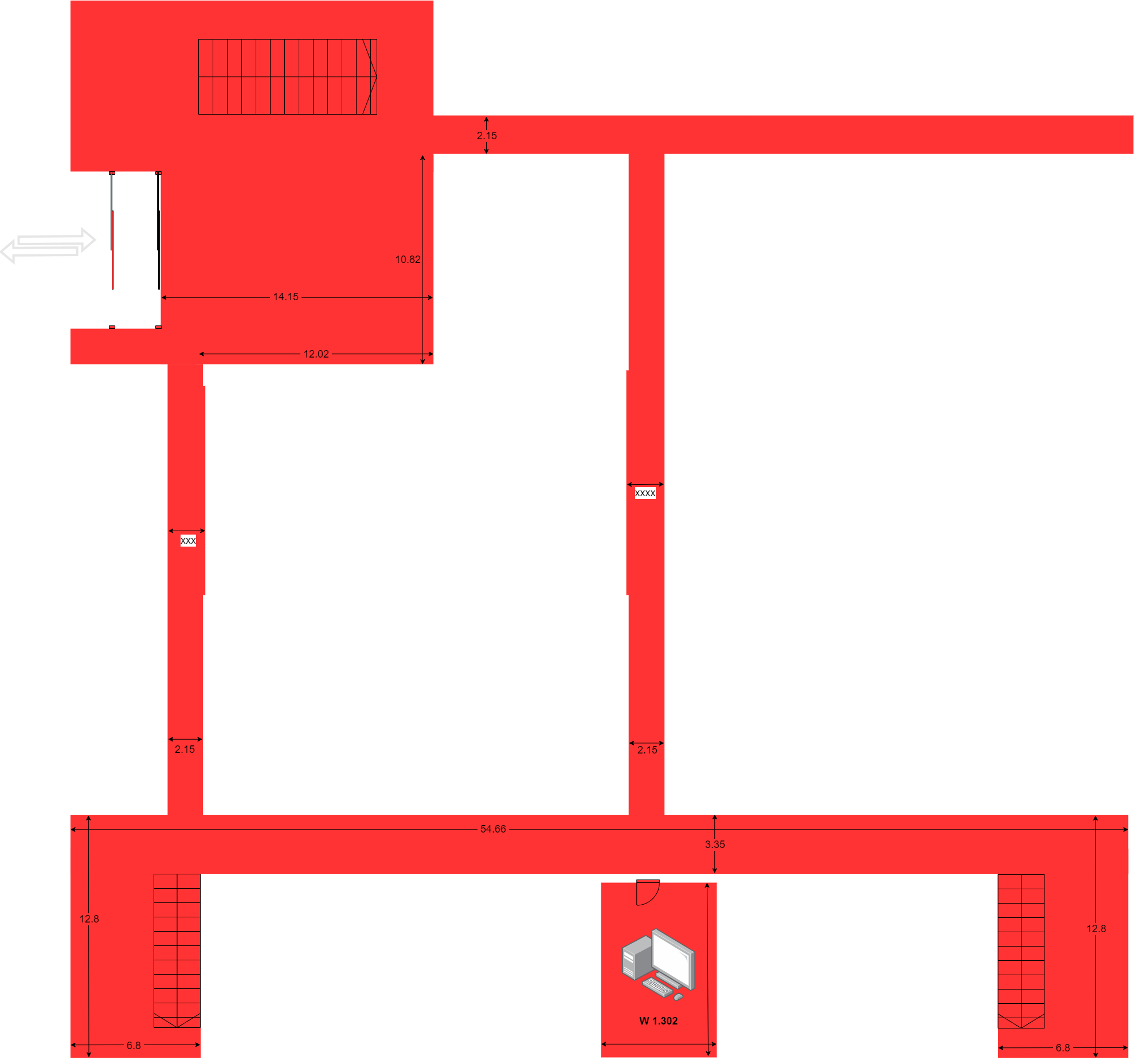
I have attached an approximate floor plan of the building to give a rough idea of what the map should look like.
For reference, my ROS bag file is available for download at the following link:
https://drive.google.com/drive/folders/1O-AxZq4SOhJGS_qLU_mdi89gLUw1mzFN?usp=drive_linkThank you in advance for any help or insights! I truly appreciate any suggestions or assistance.
Best regards