Hi Mathieu,
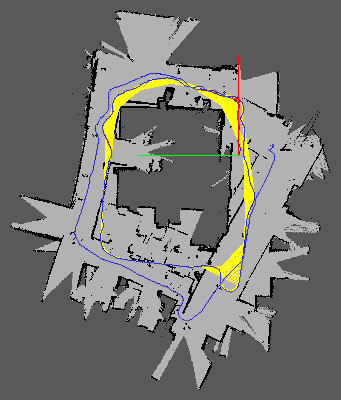
We are using RTAB-Map to map an indoor office environment with cubicles, white walls, corridors, etc. We manually control the robot, TURTLEBOT3 equipped with a 2D lidar and a RealSense d415, to walk around cubicles and make the same loop twice. However, on the map the second loop is much shifted from the first (please see Fig.1 with database
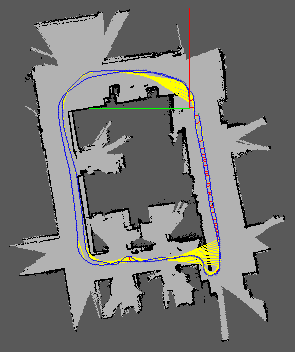
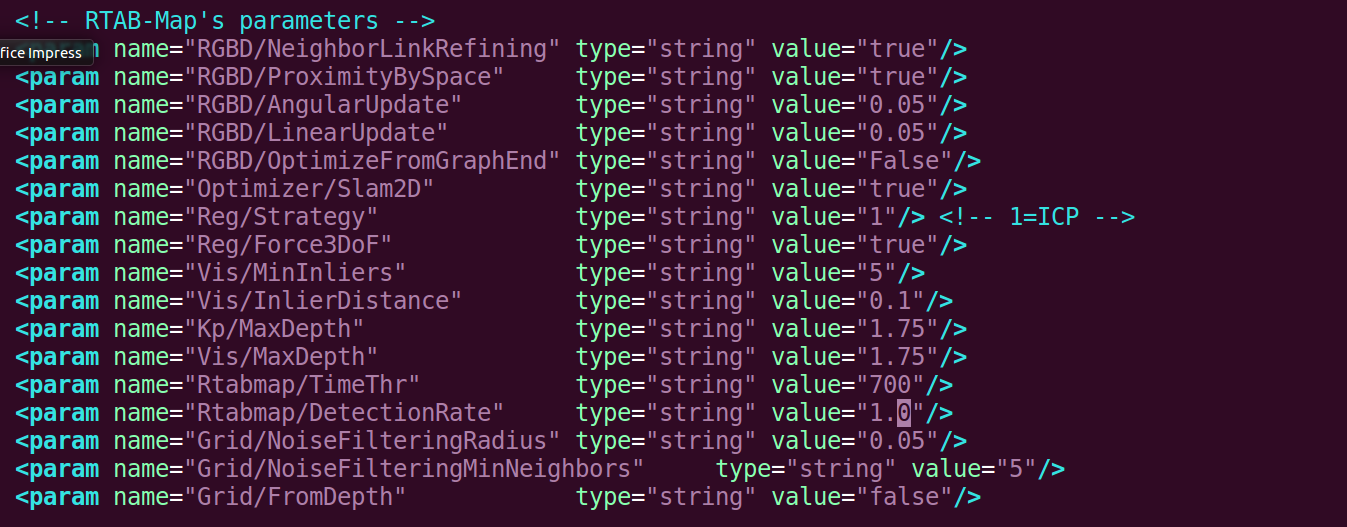
here). Using the same rtabmap parameters, we did the same thing and got a map with less non-overlapping issues (please see Fig.2). I attached the rtabmap parameters. I am trying to find the cause of the shift, which seems to be related to how I operated the robot. I am very new to this field and still learning ROS and the use of RTAB-Map. If you had any comment or thought to share, I would much appreciate it.
Thanks,
Qian


