Hi,
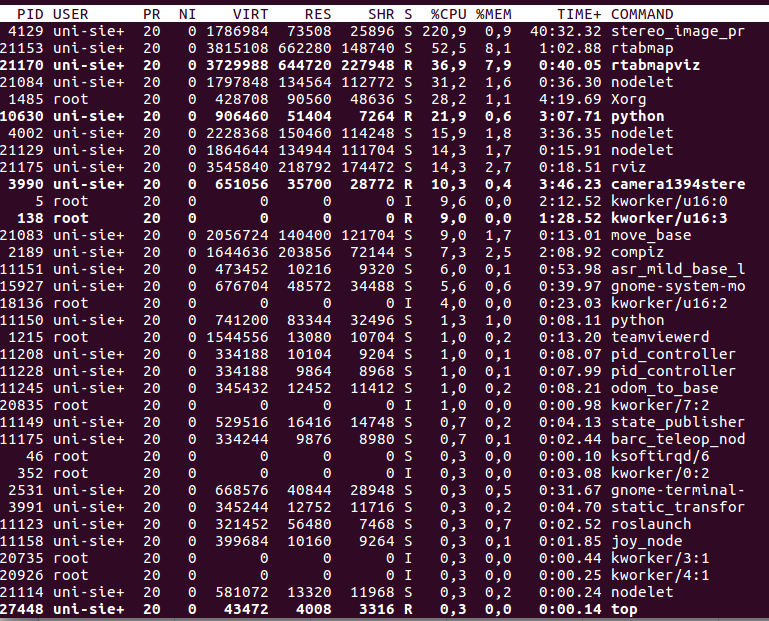
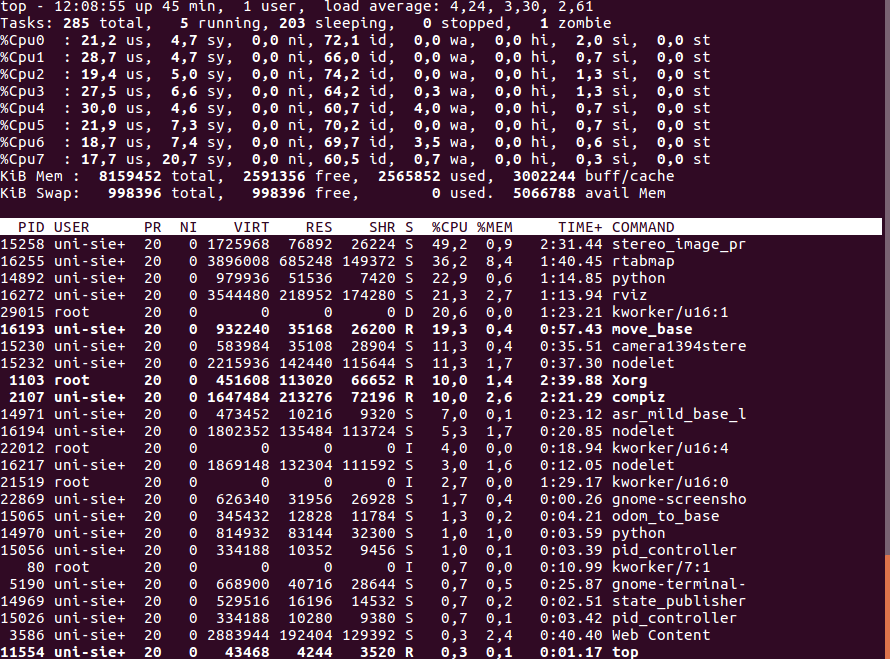
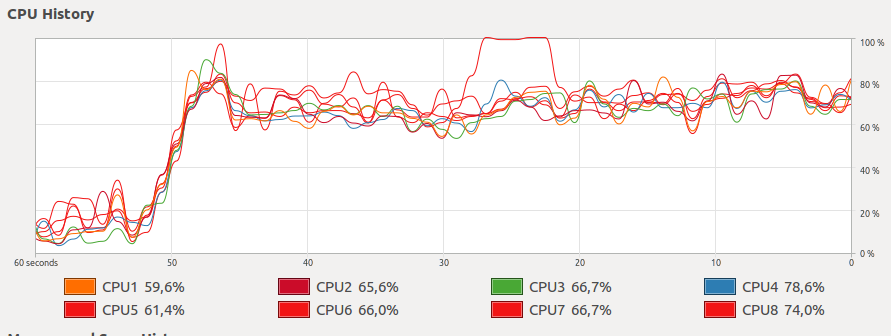
here is the current usage from top, also showing the cores of my CPU.
matlabbe wrote
When adding more nodes using processing power, it is likely that control loop may suffer, if the system doesn't have many CPU cores.
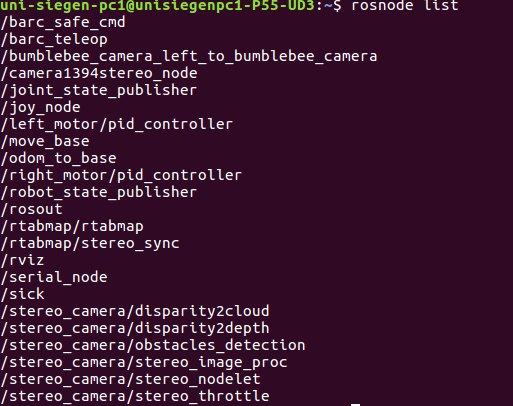
Do you mean ros nodes or nodes in graph of rtabmap. If you meant ros nodes, then here is my current rosnode list.
If you mean graph nodes in rtabmap, I have also tried to map a small environment and perform navigation. The results did not change much.
I am using wheel odometry to further save the CPU usage. But the problem still persists i.e. the motion command is not generated on time, so the robot hits the obstacle until the next motion command comes from move_base. The local path is also generated too late. What I do not understand is, why it is slow with rtabmap?
Here is the rqt_graph for navigation with rtabmap, only using laser as observation source for navigation.
https://drive.google.com/file/d/19EN9e319J3xElrrA7lNiStzsXfA1V7hD/view?usp=sharingHere is the rqt_graph for navigation with amcl, only laser as observation source for navigation.
https://drive.google.com/file/d/16PxoHRVQymbvRYjidGFcXHe3MTVNuiB5/view?usp=sharingI have also checked transform. The main difference that i see is in map-to-odom :
for rtabmap:
Average rate: 20.425; most recent transform: xxxxx(-0.056 sec old), Buffer length: 2.350sec
for amcl:
Average rate: 4.396; most recent transform: xxxxx(-0.301 sec old), Buffer length: 4.777sec
Other data seems to fairly same.
In case of navigation with rtabmap, there is timed out waiting for transform warning two times at the beginning. I understand that this is because the map is not loaded yet and localization is not started.
Other than that there is no warning at all, just info from rtabmap and got new plan continuously.


 .
.