Hello Everyone,
I've been trying develop a system of multiple Intel D435is, working on a single session of RTabMap, in order to get a single PointCloud from all three cameras running at the same time.
My cameras' field of view have around 20% overlap.
I've adapted the
Demo With Two Kinects launch file for my cameras for this purpose.
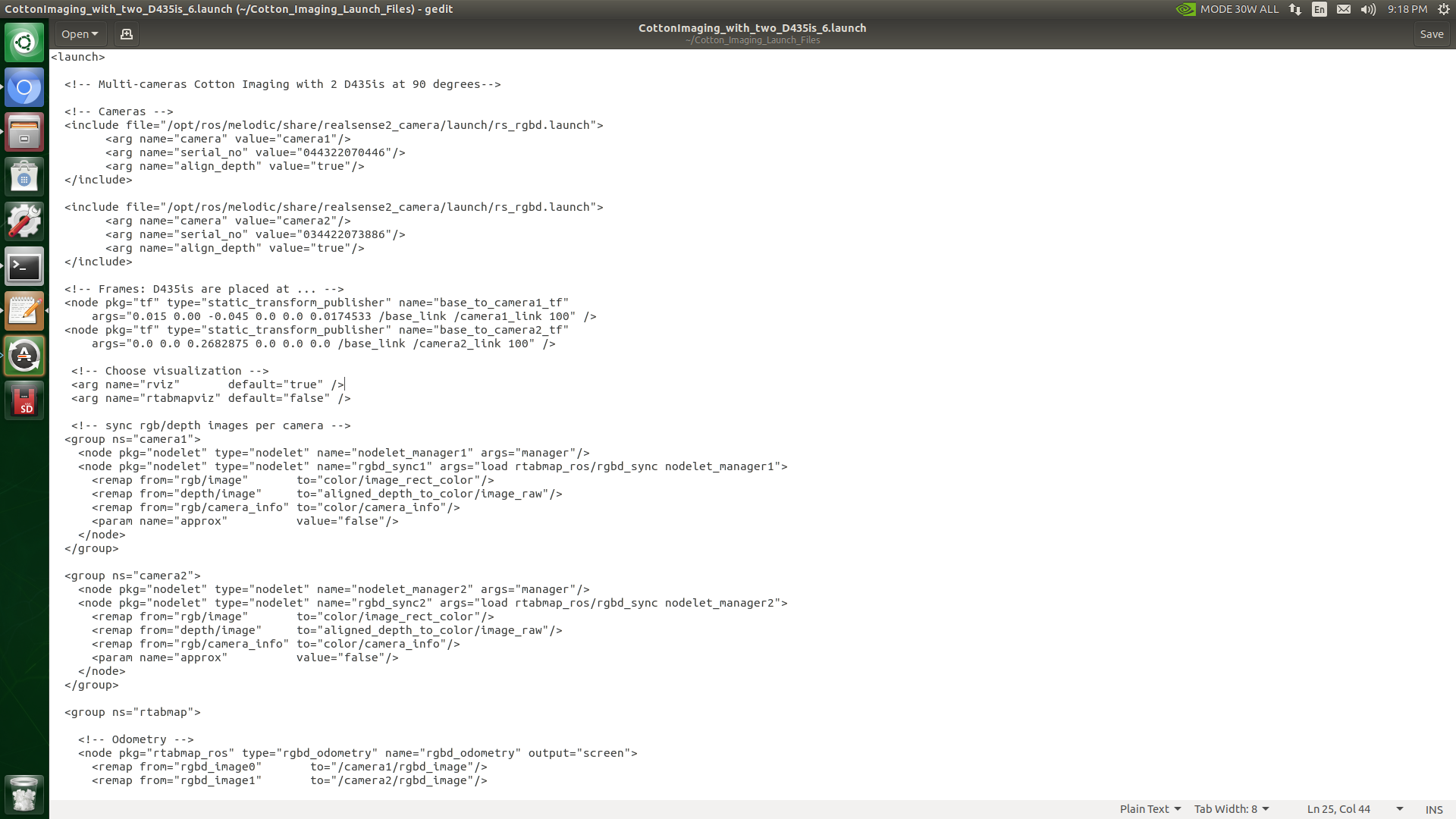
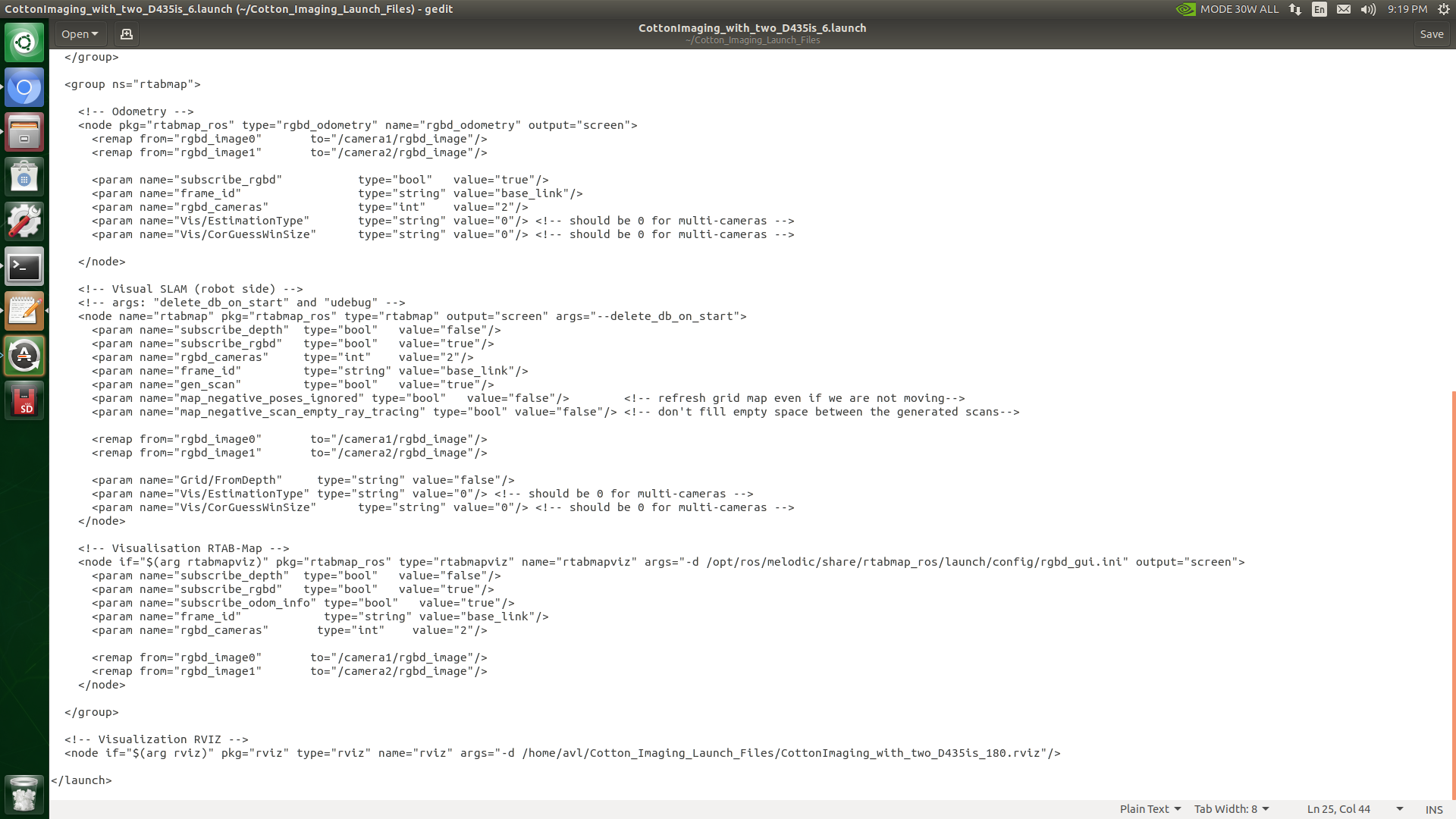
From what I could tell, with using this launch file, RTabMap is not actually stitching the Point Clouds produced from the two cameras and it's just putting them in the same global map with respect to the 3D positions defined for the cameras.
So I wanted to know if it's possible to at the same time also have RTabMap stitching the pointclouds from the separate cameras rather than just producing a point clouds for each camera separately.

