For experimentation I tried to use a cheap, dual RGB camera to use with RTAB-Map with visual odometry.
I calibrated the camera and used approximate sync for the images, but the results are not satisfying. There is a lot of noise and the features being captured jump around too much from frame to frame.
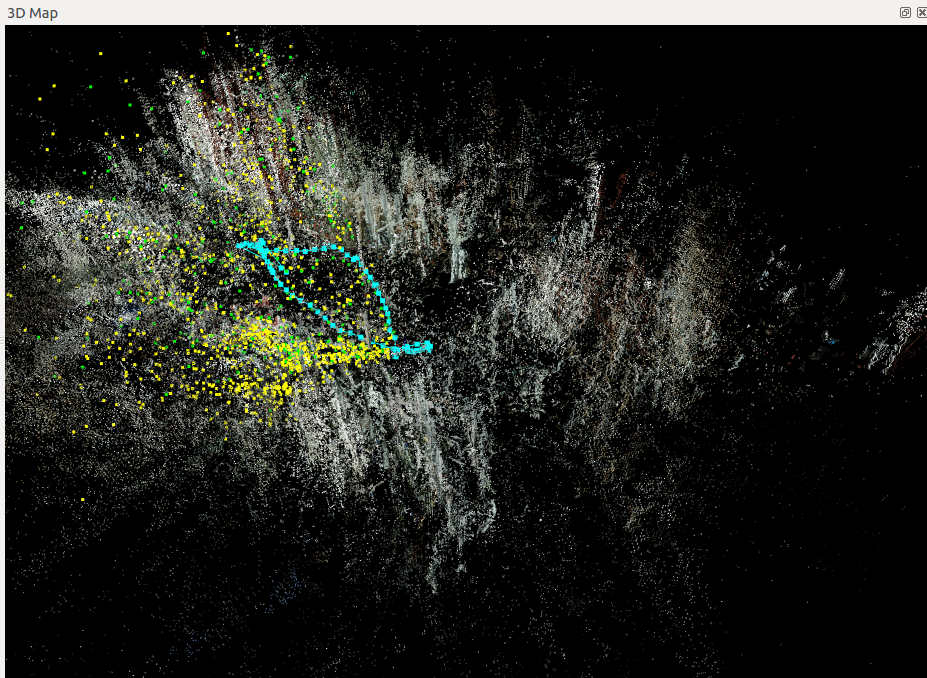
Here is a quick map that I made:
There are many noisy points, and everything seems somewhat distorted or mislocated.
I'm wondering if anyone has tried something similar, to see if my low quality is the result of the low quality camera, or if I'm forgetting to tune some parameters related to RTAB-Map?
I'm following this tutorial
http://wiki.ros.org/rtabmap_ros/Tutorials/StereoHandHeldMappingAnd using some code from the 2.7 Stereo B section here
http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobotThanks!