Hi,
For
util3d::createTextureMesh(), you will need the created mesh from
util3d::createMesh(), the camera models and the corresponding images. Here is an example from the code above:
std::map<int, Signature> nodes;
std::map<int, Transform> optimizedPoses;
std::multimap<int, Link> links;
rtabmap->get3DMap(nodes, optimizedPoses, links, true, true);
pcl::PointCloud<pcl::PointXYZRGBNormal>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBNormal>);
std::map<int, CameraModel> cameraModels;
std::map<int, cv::Mat> images;
float voxel = 0.02f;
for(std::map<int, Transform>::iterator iter=optimizedPoses.begin(); iter!=optimizedPoses.end(); ++iter)
{
Signature node = nodes.find(iter->first)->second;
// uncompress data
node.sensorData().uncompressData();
pcl::PointCloud<pcl::PointXYZRGB>::Ptr tmp = util3d::cloudRGBFromSensorData(
node.sensorData(),
4, // image decimation before creating the clouds
3.0f, // maximum depth of the cloud
voxel); // Voxel grid filtering
pcl::PointCloud<pcl::PointXYZRGBNormal>::Ptr tmpWithNormals = util3d::computeNormals(tmp);
*cloud += *util3d::transformPointCloud(tmpWithNormals, iter->second); // transform the point cloud to its pose
cameraModels.insert(std::make_pair(iter->first, node.sensorData().cameraModels()[0]));
images.insert(std::make_pair(iter->first, node.sensorData().imageRaw()));
}
cloud = util3d::voxelize(cloud, voxel);
pcl::io::savePCDFile("cloud.pcd", *cloud);
pcl::PolygonMesh::Ptr mesh = util3d::createMesh(
cloud,
voxel*4.0f);
pcl::TextureMesh::Ptr textureMesh = util3d::createTextureMesh(
mesh,
optimizedPoses,
cameraModels,
images,
"."); // temporary directory for generated textures
pcl::io::saveOBJFile("mesh.obj", *textureMesh);
cloud.pcd:

mesh.obj:
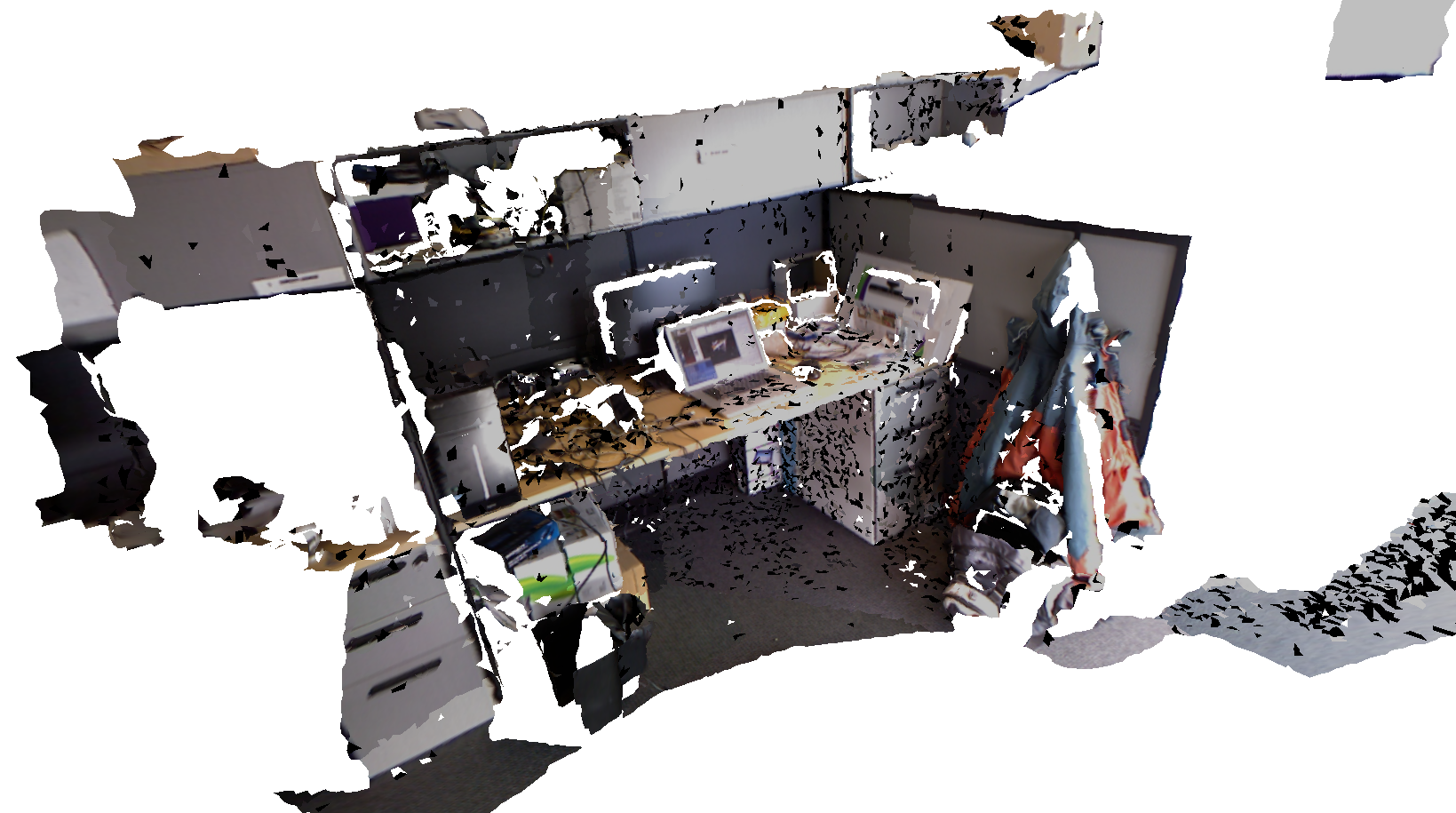
cheers


