Hi all,
I'm encountering an issue while manually assembling a point cloud from a database file using RTAB-Map. As shown in the images below, after manually adding a few loop closures and running some post-processing in the database editor, the RTAB-Map GUI displays a well-aligned point cloud. Exporting the point cloud directly from the GUI also works correctly.
However, when I follow the example for assembling and exporting a point cloud from the
RGBD Mapping Tutorial, the result appears warped and doesn't match what I see in the GUI.
I reviewed the code in the
export binary, which suggests applying full global optimization. However, this did not resolve the issue for me either.
Does RTAB-Map perform any additional processing or alignment steps internally (beyond global optimization) when generating the point cloud in the GUI?
The reason I want to manual export the cloud is to perform semantic image segmentation on individual frames and attach additional labels to the final point cloud.
Here is a link to my code though it's still a bit messy and in progress.
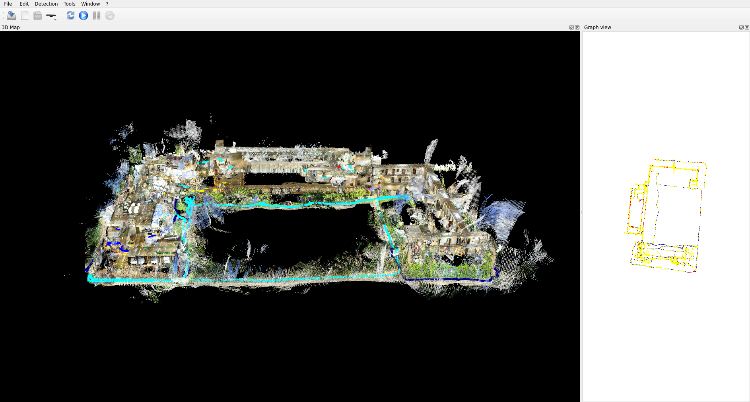
View of the point cloud in the RTAB-Map GUI
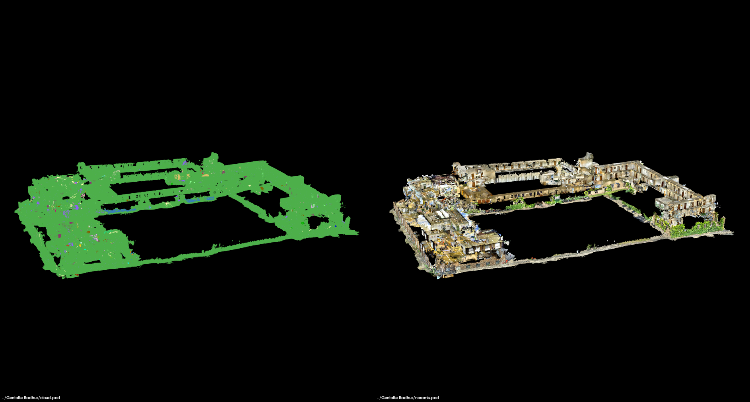
Export from the RTAB-Map GUI

Warped result from manual export