Key frame can't be added constantly


|
Hey matlabbe, thank you for your awesome contribute.
I used RTAB for a long time. Recently I want to switch to the source build version instead of installing from software repository, because of the nicer VIO in the latest version. I got through the compile and try the demos, I found that RTAP reconstruct the environment for a well, then new point can't be added into map constantly 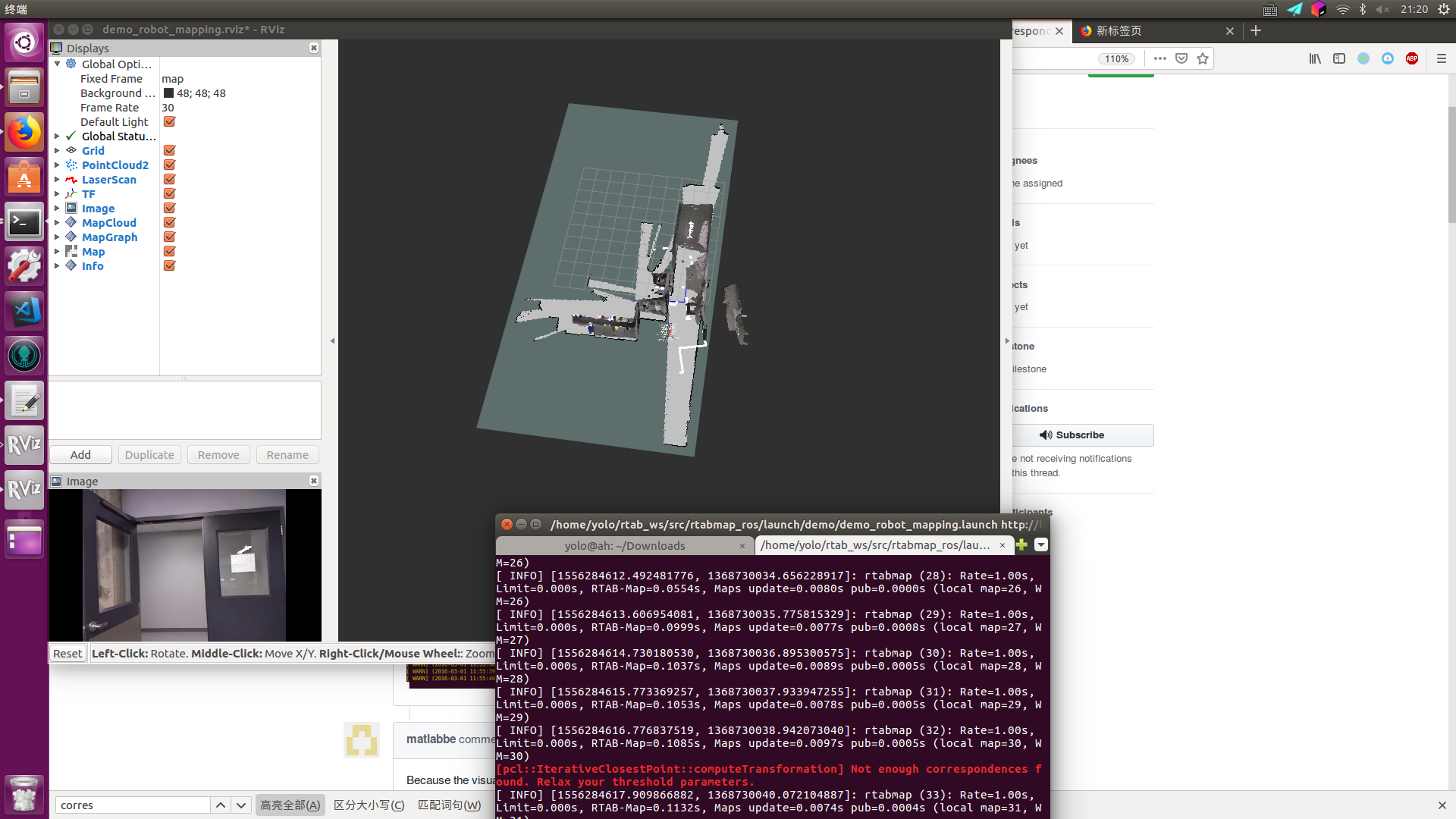 look this image, There is no projected map under the robot ( right part of the map ), and the shell shows a error message: [pcl::IterativeClosestPoint::computeTransformation] Not enough correspondences found. Relax your threshold parameters. Then I try a Eucrou dataset, RTAB behave similarly: working well at the beginning and suddenly dosen't add any key frame to the map... How to solve this problem? thanks! |
|
Administrator
|
Hi,
Can you show the command lines used with demo_mapping.bag and the output of cmake of rtabmap build? cheers, Mathieu |
|
|
here is cmake output -- The C compiler identification is GNU 5.4.0 -- The CXX compiler identification is GNU 5.4.0 -- Check for working C compiler: /usr/bin/cc -- Check for working C compiler: /usr/bin/cc -- works -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Detecting C compile features -- Detecting C compile features - done -- Check for working CXX compiler: /usr/bin/c++ -- Check for working CXX compiler: /usr/bin/c++ -- works -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Detecting CXX compile features -- Detecting CXX compile features - done CMake Deprecation Warning at CMakeLists.txt:64 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at CMakeLists.txt:67 (cmake_policy): The OLD behavior for policy CMP0043 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. -- Checking for module 'eigen3' -- Found eigen3, version 3.2.92 -- Found eigen: /usr/include/eigen3 -- Checking for module 'libopenni' -- Found libopenni, version 1.5.4.0 -- Found openni: /usr/lib/libOpenNI.so -- Checking for module 'libopenni2' -- No package 'libopenni2' found -- Could NOT find OpenNI2 (missing: OPENNI2_LIBRARY OPENNI2_INCLUDE_DIRS) -- The imported target "vtkRenderingPythonTkWidgets" references the file "/usr/lib/x86_64-linux-gnu/libvtkRenderingPythonTkWidgets.so" but this file does not exist. Possible reasons include: * The file was deleted, renamed, or moved to another location. * An install or uninstall procedure did not complete successfully. * The installation package was faulty and contained "/usr/lib/cmake/vtk-6.2/VTKTargets.cmake" but not all the files it references. -- The imported target "vtk" references the file "/usr/bin/vtk" but this file does not exist. Possible reasons include: * The file was deleted, renamed, or moved to another location. * An install or uninstall procedure did not complete successfully. * The installation package was faulty and contained "/usr/lib/cmake/vtk-6.2/VTKTargets.cmake" but not all the files it references. -- Found libusb-1.0: /usr/include -- Checking for module 'flann' -- Found flann, version 1.8.4 -- Found Flann: /usr/lib/x86_64-linux-gnu/libflann_cpp_s.a -- Found qhull: /usr/lib/x86_64-linux-gnu/libqhull.so -- Checking for module 'libopenni2' -- No package 'libopenni2' found -- Could NOT find OpenNI2 (missing: OPENNI2_LIBRARY OPENNI2_INCLUDE_DIRS) -- Found PCL_COMMON: /usr/lib/x86_64-linux-gnu/libpcl_common.so -- Found PCL_OCTREE: /usr/lib/x86_64-linux-gnu/libpcl_octree.so -- Found PCL_IO: /usr/lib/x86_64-linux-gnu/libpcl_io.so -- Found PCL_KDTREE: /usr/lib/x86_64-linux-gnu/libpcl_kdtree.so -- Found PCL_SEARCH: /usr/lib/x86_64-linux-gnu/libpcl_search.so -- Found PCL_SURFACE: /usr/lib/x86_64-linux-gnu/libpcl_surface.so -- Found PCL_FILTERS: /usr/lib/x86_64-linux-gnu/libpcl_filters.so -- Found PCL_FEATURES: /usr/lib/x86_64-linux-gnu/libpcl_features.so -- Found PCL_REGISTRATION: /usr/lib/x86_64-linux-gnu/libpcl_registration.so -- Found PCL_SAMPLE_CONSENSUS: /usr/lib/x86_64-linux-gnu/libpcl_sample_consensus.so -- Found PCL_GEOMETRY: /usr/include/pcl-1.7 -- Found PCL_SEGMENTATION: /usr/lib/x86_64-linux-gnu/libpcl_segmentation.so -- Found PCL_VISUALIZATION: /usr/lib/x86_64-linux-gnu/libpcl_visualization.so -- PCL definitions don't contain "-march=native", make sure all libraries using Eigen are also compiled without that flag to avoid some segmentation faults (with gdb referring to some Eigen functions). -- Found Sqlite3: /usr/include /usr/lib/x86_64-linux-gnu/libsqlite3.so -- Found OpenMP_C: -fopenmp (found version "4.0") -- Found OpenMP_CXX: -fopenmp (found version "4.0") -- Found OpenMP: TRUE (found version "4.0") -- Found OpenMP -- Found OpenCV: /opt/ros/kinetic/include/opencv-3.3.1-dev;/opt/ros/kinetic/include/opencv-3.3.1-dev/opencv -- Found PCL: /usr/include/pcl-1.7;/usr/include/eigen3;/usr/include;/usr/include/ni;/usr/include/vtk-6.2;/usr/include/freetype2;/usr/include/x86_64-linux-gnu/freetype2;/usr/include/jsoncpp;/usr/lib/openmpi/include/openmpi/opal/mca/event/libevent2021/libevent;/usr/lib/openmpi/include/openmpi/opal/mca/event/libevent2021/libevent/include;/usr/lib/openmpi/include;/usr/lib/openmpi/include/openmpi;/usr/include/python2.7;/usr/include/x86_64-linux-gnu;/usr/include/hdf5/openmpi;/usr/include/libxml2;/usr/include/tcl -- Found ZLIB: /usr/include -- VTK_RENDERING_BACKEND=OpenGL -- Found Freenect: /usr/include -- Found DC1394: /usr/include/dc1394 -- Found CSPARSE: /usr/include/suitesparse -- Old g2o version detected with c++03 interface (config file: /opt/ros/kinetic/include/g2o/config.h). -- Found g2o: /opt/ros/kinetic/include;/usr/include/suitesparse;/usr/include/suitesparse -- GTSAM include directory: /usr/local/lib/cmake/GTSAM/../../../include;/usr/include;/usr/local/include/gtsam/3rdparty/Eigen/ -- FlyCapture2_INCLUDE_DIR=FlyCapture2_INCLUDE_DIR-NOTFOUND -- FlyCapture2_LIBRARY=FlyCapture2_LIBRARY-NOTFOUND -- Triclops_INCLUDE_DIR=Triclops_INCLUDE_DIR-NOTFOUND -- Triclops_LIBRARY=Triclops_LIBRARY-NOTFOUND -- FlyCaptureBridge_LIBRARY=FlyCaptureBridge_LIBRARY-NOTFOUND -- Found octomap 1.8.1: /opt/ros/kinetic/include -- Performing Test COMPILER_SUPPORTS_CXX11 -- Performing Test COMPILER_SUPPORTS_CXX11 - Success -- Performing Test COMPILER_SUPPORTS_CXX0X -- Performing Test COMPILER_SUPPORTS_CXX0X - Success -- Found Pthreads CMake Deprecation Warning at tools/KittiDataset/CMakeLists.txt:14 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/RgbdDataset/CMakeLists.txt:14 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/EurocDataset/CMakeLists.txt:30 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/Recovery/CMakeLists.txt:12 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/Reprocess/CMakeLists.txt:12 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/DetectMoreLoopClosures/CMakeLists.txt:12 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at tools/Report/CMakeLists.txt:16 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at examples/BOWMapping/CMakeLists.txt:27 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at examples/RGBDMapping/CMakeLists.txt:41 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at examples/WifiMapping/CMakeLists.txt:35 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at examples/NoEventsExample/CMakeLists.txt:35 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. CMake Deprecation Warning at examples/Export/CMakeLists.txt:28 (cmake_policy): The OLD behavior for policy CMP0020 will be removed from a future version of CMake. The cmake-policies(7) manual explains that the OLD behaviors of all policies are deprecated and that a policy should be set to OLD only under specific short-term circumstances. Projects should be ported to the NEW behavior and not rely on setting a policy to OLD. -- -------------------------------------------- -- Info : -- Version : 0.19.2 -- CMAKE_INSTALL_PREFIX = /usr/local -- CMAKE_BUILD_TYPE = Release -- CMAKE_INSTALL_LIBDIR = lib -- BUILD_APP = ON -- BUILD_TOOLS = ON -- BUILD_EXAMPLES = ON -- BUILD_SHARED_LIBS = ON -- CMAKE_CXX_FLAGS = -fmessage-length=0 -fopenmp -std=c++11 -- FLANN_KDTREE_MEM_OPT = OFF -- PCL_DEFINITIONS = -DEIGEN_USE_NEW_STDVECTOR;-DEIGEN_YES_I_KNOW_SPARSE_MODULE_IS_NOT_STABLE_YET;-DFLANN_STATIC;-Dqh_QHpointer -- Optional dependencies ('*' affects some default parameters) : -- *With OpenCV 3 xfeatures2d module (SIFT/SURF/BRIEF/FREAK) = YES (License: Non commercial) -- With external SQLite3 = YES (License: Public Domain) -- With ORB OcTree = YES (License: GPLv3) -- With Freenect = YES (License: Apache v2 and/or GPLv2) -- With OpenNI2 = NO (OpenNI2 not found) -- With Freenect2 = NO (libfreenect2 not found) -- With Kinect for Windows 2 = NO (Kinect for Windows 2 SDK not found) -- With dc1394 = YES (License: LGPL) -- With FlyCapture2/Triclops = NO (Point Grey SDK not found) -- With TORO = YES (License: Creative Commons [Attribution-NonCommercial-ShareAlike]) -- *With g2o = YES (License: BSD) -- *With GTSAM = YES (License: BSD) -- With VERTIGO = YES (License: GPLv3) -- With cvsba = NO (cvsba not found) -- *With libpointmatcher = NO (libpointmatcher not found) -- With loam_velodyne = NO (loam_velodyne not found) -- With ZED = NO (ZED sdk not found) -- With RealSense = NO (librealsense not found) -- With RealSense2 = NO (librealsense2 not found) -- With OCTOMAP = YES (License: BSD) -- With CPUTSDF = NO (CPUTSDF not found) -- With OpenChisel = NO (open_chisel not found) -- With libfovis = NO (libfovis not found) -- With libviso2 = NO (libviso2 not found) -- With dvo_core = NO (dvo_core not found) -- With okvis = NO (okvis not found) -- With msckf_vio = NO (WITH_MSCKF_VIO=OFF) -- With VINS-Fusion = NO (VINS-Fusion not found) -- With ORB_SLAM2 = NO (WITH_G2O should be OFF as ORB_SLAM2 uses its own g2o version) -- With Qt5 = YES (License: Open Source or Commercial) -- -------------------------------------------- -- Configuring done -- Generating done -- Build files have been written to: /home/yolo/coding/rtabmap/build |
|
|
In reply to this post by matlabbe
AND here is the cmd output of the demo, after RTAB no longer add any new map, I shut down the terminal
yolo@ah:~$ roslaunch rtabmap_ros demo_robot_mapping.launch rtabmap_args:="--delete_db_on_start" ... logging to /home/yolo/.ros/log/1cf4b694-68fa-11e9-9860-9cb6d0055fd3/roslaunch-ah-11035.log Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://ah:34723/ SUMMARY ======== PARAMETERS * /points_xyzrgb/depth/image_transport: compressedDepth * /points_xyzrgb/queue_size: 10 * /points_xyzrgb/rgb/image_transport: compressed * /points_xyzrgb/voxel_size: 0.01 * /rosdistro: kinetic * /rosversion: 1.12.14 * /rtabmap/rtabmap/Grid/FromDepth: false * /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.4 * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/Mem/STMSize: 30 * /rtabmap/rtabmap/RGBD/LocalRadius: 5 * /rtabmap/rtabmap/RGBD/NeighborLinkRefining: true * /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: false * /rtabmap/rtabmap/RGBD/OptimizeMaxError: 3 * /rtabmap/rtabmap/RGBD/ProximityBySpace: true * /rtabmap/rtabmap/RGBD/ProximityByTime: false * /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 10 * /rtabmap/rtabmap/Reg/Force3DoF: true * /rtabmap/rtabmap/Reg/Strategy: 1 * /rtabmap/rtabmap/Vis/MinInliers: 12 * /rtabmap/rtabmap/depth/image_transport: compressedDepth * /rtabmap/rtabmap/frame_id: base_footprint * /rtabmap/rtabmap/odom_frame_id: odom * /rtabmap/rtabmap/odom_tf_angular_variance: 0.001 * /rtabmap/rtabmap/odom_tf_linear_variance: 0.001 * /rtabmap/rtabmap/rgb/image_transport: compressed * /rtabmap/rtabmap/subscribe_depth: True * /rtabmap/rtabmap/subscribe_scan: True * /rtabmap/rtabmap/wait_for_transform: True * /rtabmap/rtabmapviz/depth/image_transport: compressedDepth * /rtabmap/rtabmapviz/frame_id: base_footprint * /rtabmap/rtabmapviz/rgb/image_transport: compressed * /rtabmap/rtabmapviz/subscribe_depth: True * /rtabmap/rtabmapviz/subscribe_scan: True * /rtabmap/rtabmapviz/wait_for_transform: True * /use_sim_time: True NODES /rtabmap/ rtabmap (rtabmap_ros/rtabmap) rtabmapviz (rtabmap_ros/rtabmapviz) / points_xyzrgb (nodelet/nodelet) auto-starting new master process[master]: started with pid [11045] ROS_MASTER_URI=http://localhost:11311 setting /run_id to 1cf4b694-68fa-11e9-9860-9cb6d0055fd3 process[rosout-1]: started with pid [11058] started core service [/rosout] process[rtabmap/rtabmap-2]: started with pid [11082] process[rtabmap/rtabmapviz-3]: started with pid [11083] process[points_xyzrgb-4]: started with pid [11084] [ INFO] [1556375905.644473899]: Starting node... [ INFO] [1556375905.684639656]: Initializing nodelet with 8 worker threads. [ INFO] [1556375905.800188861]: Starting node... [ INFO] [1556375905.906239440]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000 [ INFO] [1556375905.906276817]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000 [ INFO] [1556375905.906297572]: /rtabmap/rtabmap(maps): map_cleanup = true [ INFO] [1556375905.906308978]: /rtabmap/rtabmap(maps): map_always_update = false [ INFO] [1556375905.906323197]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true [ INFO] [1556375905.906338391]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true [ INFO] [1556375905.906359562]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false [ INFO] [1556375905.906376509]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2 [ INFO] [1556375905.917341395]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16 [ INFO] [1556375905.973141646]: rtabmapviz: Using configuration from "/home/yolo/rtab_ws/src/rtabmap_ros/launch/config/rgbd_gui.ini" [ INFO] [1556375905.973607268]: rtabmap: frame_id = base_footprint [ INFO] [1556375905.973632635]: rtabmap: odom_frame_id = odom [ INFO] [1556375905.973651028]: rtabmap: map_frame_id = map [ INFO] [1556375905.973668029]: rtabmap: use_action_for_goal = false [ INFO] [1556375905.973687228]: rtabmap: tf_delay = 0.050000 [ INFO] [1556375905.973702882]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1556375905.973717921]: rtabmap: odom_sensor_sync = false [ INFO] [1556375906.057429413]: Setting RTAB-Map parameter "Grid/FromDepth"="false" [ INFO] [1556375906.099148905]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.4" [ INFO] [1556375906.179253257]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true" [ INFO] [1556375906.179756389]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false" [ INFO] [1556375906.199189237]: Setting RTAB-Map parameter "Mem/STMSize"="30" [ INFO] [1556375906.242518295]: Setting RTAB-Map parameter "RGBD/LocalRadius"="5" [ INFO] [1556375906.249928773]: Setting RTAB-Map parameter "RGBD/NeighborLinkRefining"="true" [ INFO] [1556375906.251962229]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="false" [ INFO] [1556375906.252540488]: Setting RTAB-Map parameter "RGBD/OptimizeMaxError"="3" [ INFO] [1556375906.260128811]: Setting RTAB-Map parameter "RGBD/ProximityBySpace"="true" [ INFO] [1556375906.260551838]: Setting RTAB-Map parameter "RGBD/ProximityByTime"="false" [ INFO] [1556375906.265479097]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="10" [ INFO] [1556375906.270494337]: Setting RTAB-Map parameter "Reg/Force3DoF"="true" [ INFO] [1556375906.272369389]: Setting RTAB-Map parameter "Reg/Strategy"="1" [ INFO] [1556375906.410348538]: Setting RTAB-Map parameter "Vis/MinInliers"="12" [ INFO] [1556375906.629635098]: Setting "Grid/RangeMax" parameter to 0 (default 5.000000) as "subscribe_scan" or "subscribe_scan_cloud" is true. [ INFO] [1556375906.825620331]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1556375906.827660001]: rtabmap: Deleted database "/home/yolo/.ros/rtabmap.db" (--delete_db_on_start or -d are set). [ INFO] [1556375906.827777901]: rtabmap: Using database from "/home/yolo/.ros/rtabmap.db" (0 MB). [ INFO] [1556375906.985853950, 1368730003.390613131]: rtabmap: Database version = "0.19.2". [ INFO] [1556375907.019122269, 1368730003.430877642]: /rtabmap/rtabmap: queue_size = 10 [ INFO] [1556375907.019149903, 1368730003.430877642]: /rtabmap/rtabmap: rgbd_cameras = 1 [ INFO] [1556375907.019162369, 1368730003.430877642]: /rtabmap/rtabmap: approx_sync = true [ INFO] [1556375907.019215484, 1368730003.430877642]: Setup depth callback [ INFO] [1556375907.047732813, 1368730003.450996314]: /rtabmap/rtabmap subscribed to (approx sync): /data_throttled_image/compressed, /data_throttled_image_depth/compressedDepth, /data_throttled_camera_info, /jn0/base_scan [ INFO] [1556375907.058028620, 1368730003.471114590]: rtabmap 0.19.2 started... [ INFO] [1556375907.140465359, 1368730003.551746952]: Reading parameters from the ROS server... [ INFO] [1556375907.373309722, 1368730003.783256527]: Parameters read = 304 [ INFO] [1556375907.373336213, 1368730003.783256527]: Parameters successfully read. [ INFO] [1556375907.553915910, 1368730003.964433215]: /rtabmap/rtabmapviz: queue_size = 10 [ INFO] [1556375907.553965429, 1368730003.964433215]: /rtabmap/rtabmapviz: rgbd_cameras = 1 [ INFO] [1556375907.553979631, 1368730003.964433215]: /rtabmap/rtabmapviz: approx_sync = true [ INFO] [1556375907.553997954, 1368730003.964433215]: Setup depth callback [ WARN] [1556375907.581815509, 1368730003.994629244]: Could not get transform from base_footprint to /openni_rgb_optical_frame after 0.200000 seconds (for stamp=1368730003.612737)! Error="Lookup would require extrapolation into the past. Requested time 1368730003.612736630 but the earliest data is at time 1368730003.865693820, when looking up transform from frame [openni_rgb_optical_frame] to frame [base_footprint]. canTransform returned after 0.201286 timeout was 0.2.". [ERROR] [1556375907.581853135, 1368730003.994629244]: TF of received image 0 at time 1368730003.612737s is not set! [ERROR] [1556375907.581886082, 1368730003.994629244]: Could not convert rgb/depth msgs! Aborting rtabmap update... [ INFO] [1556375907.603951616, 1368730004.014749401]: /rtabmap/rtabmapviz subscribed to (approx sync): /az3/base_controller/odom, /data_throttled_image/compressed, /data_throttled_image_depth/compressedDepth, /data_throttled_camera_info, /jn0/base_scan [ INFO] [1556375907.604110031, 1368730004.014749401]: rtabmapviz started. [ INFO] [1556375908.448912988, 1368730004.852850864]: rtabmap (1): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0430s, Maps update=0.0090s pub=0.0002s (local map=1, WM=1) [ INFO] [1556375909.563365826, 1368730005.973704517]: rtabmap (2): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0540s, Maps update=0.0043s pub=0.0000s (local map=1, WM=1) [ INFO] [1556375910.617706094, 1368730007.023771273]: rtabmap (3): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0802s, Maps update=0.0027s pub=0.0000s (local map=2, WM=2) [ INFO] [1556375911.722301883, 1368730008.134534215]: rtabmap (4): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0886s, Maps update=0.0030s pub=0.0000s (local map=3, WM=3) [ INFO] [1556375912.656435653, 1368730009.063293809]: rtabmap (5): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0906s, Maps update=0.0034s pub=0.0000s (local map=4, WM=4) [ INFO] [1556375913.735465995, 1368730010.144413146]: rtabmap (6): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0866s, Maps update=0.0031s pub=0.0000s (local map=5, WM=5) [ INFO] [1556375914.765936158, 1368730011.174028918]: rtabmap (7): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0806s, Maps update=0.0030s pub=0.0000s (local map=6, WM=6) [ INFO] [1556375915.800250170, 1368730012.204474514]: rtabmap (8): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0793s, Maps update=0.0027s pub=0.0000s (local map=7, WM=7) [ INFO] [1556375916.763502657, 1368730013.174794050]: rtabmap (9): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0478s, Maps update=0.0025s pub=0.0000s (local map=7, WM=7) [ INFO] [1556375918.023978625, 1368730014.436058363]: rtabmap (10): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1229s, Maps update=0.0053s pub=0.0000s (local map=8, WM=8) [ INFO] [1556375919.020910706, 1368730015.424802278]: rtabmap (11): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0973s, Maps update=0.0029s pub=0.0000s (local map=9, WM=9) [ INFO] [1556375920.129965278, 1368730016.535778778]: rtabmap (12): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0911s, Maps update=0.0029s pub=0.0000s (local map=10, WM=10) [ INFO] [1556375921.292735252, 1368730017.699980664]: rtabmap (13): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0824s, Maps update=0.0033s pub=0.0000s (local map=11, WM=11) [ INFO] [1556375922.305502744, 1368730018.710508176]: rtabmap (14): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0815s, Maps update=0.0028s pub=0.0000s (local map=12, WM=12) [ INFO] [1556375923.357429513, 1368730019.764730601]: rtabmap (15): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0954s, Maps update=0.0031s pub=0.0000s (local map=13, WM=13) [ INFO] [1556375924.511278627, 1368730020.916395526]: rtabmap (16): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1016s, Maps update=0.0035s pub=0.0000s (local map=14, WM=14) [ INFO] [1556375925.698854519, 1368730022.110661290]: rtabmap (17): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1164s, Maps update=0.0040s pub=0.0000s (local map=15, WM=15) [ INFO] [1556375926.693747192, 1368730023.100653104]: rtabmap (18): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1075s, Maps update=0.0038s pub=0.0000s (local map=16, WM=16) [ INFO] [1556375927.761599395, 1368730024.171757695]: rtabmap (19): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1051s, Maps update=0.0036s pub=0.0000s (local map=17, WM=17) [ INFO] [1556375928.784014708, 1368730025.192263356]: rtabmap (20): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1046s, Maps update=0.0041s pub=0.0000s (local map=18, WM=18) [ INFO] [1556375929.774648407, 1368730026.181991769]: rtabmap (21): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0945s, Maps update=0.0033s pub=0.0000s (local map=19, WM=19) [ INFO] [1556375930.794680172, 1368730027.202471782]: rtabmap (22): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0970s, Maps update=0.0036s pub=0.0000s (local map=20, WM=20) [ INFO] [1556375931.903243705, 1368730028.313320544]: rtabmap (23): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1125s, Maps update=0.0031s pub=0.0000s (local map=21, WM=21) [ INFO] [1556375932.933761443, 1368730029.339041333]: rtabmap (24): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1154s, Maps update=0.0031s pub=0.0000s (local map=22, WM=22) [ INFO] [1556375934.128059947, 1368730030.540526982]: rtabmap (25): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1216s, Maps update=0.0044s pub=0.0000s (local map=23, WM=23) [ INFO] [1556375935.255988129, 1368730031.662361709]: rtabmap (26): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1001s, Maps update=0.0017s pub=0.0000s (local map=24, WM=24) [ INFO] [1556375936.275689812, 1368730032.682394280]: rtabmap (27): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1231s, Maps update=0.0035s pub=0.0000s (local map=25, WM=25) [ INFO] [1556375937.272309215, 1368730033.682768523]: rtabmap (28): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0749s, Maps update=0.0020s pub=0.0000s (local map=25, WM=25) [ INFO] [1556375938.270757242, 1368730034.682738000]: rtabmap (29): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0730s, Maps update=0.0020s pub=0.0000s (local map=25, WM=25) [ INFO] [1556375939.375499445, 1368730035.784501003]: rtabmap (30): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1070s, Maps update=0.0018s pub=0.0000s (local map=26, WM=26) [ INFO] [1556375940.549891240, 1368730036.956977718]: rtabmap (31): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1675s, Maps update=0.0024s pub=0.0000s (local map=27, WM=27) [ INFO] [1556375941.535750098, 1368730037.946946805]: rtabmap (32): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0952s, Maps update=0.0026s pub=0.0000s (local map=28, WM=28) [ INFO] [1556375942.546776601, 1368730038.957385550]: rtabmap (33): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1207s, Maps update=0.0045s pub=0.0000s (local map=29, WM=29) [ INFO] [1556375943.663741360, 1368730040.069162619]: rtabmap (34): Rate=1.00s, Limit=0.000s, RTAB-Map=0.1000s, Maps update=0.0023s pub=0.0000s (local map=30, WM=30) [pcl::IterativeClosestPoint::computeTransformation] Not enough correspondences found. Relax your threshold parameters. [ INFO] [1556375944.745773874, 1368730041.150187937]: rtabmap (35): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0975s, Maps update=0.0029s pub=0.0000s (local map=31, WM=31) ^Z |
|
Administrator
|
Hi,
I get also ICP warnings around 30 nodes added to map and some at the end: RTAB-Map=0.0778s, Maps update=0.0020s pub=0.0000s (local map=29, WM=29) [ INFO] [1556641518.541723642, 1368730040.566602338]: rtabmap (34): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0889s, Maps update=0.0019s pub=0.0000s (local map=30, WM=30) [pcl::IterativeClosestPoint::computeTransformation] Not enough correspondences found. Relax your threshold parameters. [ INFO] [1556641519.702256953, 1368730041.726246302]: rtabmap (35): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0823s, Maps update=0.0012s pub=0.0000s (local map=31, WM=31) [pcl::IterativeClosestPoint::computeTransformation] Not enough correspondences found. Relax your threshold parameters. [ INFO] [1556641520.813387571, 1368730042.839413904]: rtabmap (36): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0697s, Maps update=0.0022s pub=0.0000s (local map=32, WM=32) [pcl::IterativeClosestPoint::computeTransformation] Not enough correspondences found. Relax your threshold parameters. [ INFO] [1556641521.781895855, 1368730043.810958082]: rtabmap (37): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0877s, Maps update=0.0024s pub=0.0000s (local map=33, WM=33) [ INFO] [1556641522.915030009, 1368730044.941682868]: rtabmap (38): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0604s, Maps update=0.0022s pub=0.0000s (local map=34, WM=34)This is caused by the proximity detection approach, trying to match with neighbor scans. Those warnings can be ignored in this case. The mapping should continue however. In your case you say the mapping stops. Has demo_robot_mapping.launch been modified? There is no reason to stop as wheel odometry is used, so no "odometry lost" problems. On EuRoC dataset, what are the errors/warnings in terminal? If odometry quality is zero, it means the odometry is lost. Note that for V1/V2 datasets, we should start the bags forward in time (just after drone take off). You can also reset manually odometry after take off. For demo mapping, here is what I have (which is correct) even with the warnings above:  cheers, Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |