Hi Luca,
local matches (yellow background) are proximity detections. Proximity detections (enabled with RGBD/ProximityBySpace parameter) are done in two steps, first using strategy defined by Reg/Strategy (so either visual or lidar or both) on the closest node in the graph. The second step (now called "one-to-many", or referred as merged scans approach or icp multi) detection refers to the "If laser scans are used...", it means if scan data is present in the database. We can disable the second step by setting this parameter to 0:
Param: RGBD/ProximityPathMaxNeighbors = "0" [Maximum neighbor nodes compared on each path for one-to-many proximity detection. Set to 0 to disable one-to-many proximity detection (by merging the laser scans).]
Note that the
default is updated depending if you are subscribing to a 2D or 3D lidar (and if Reg/Strategy >= 1).
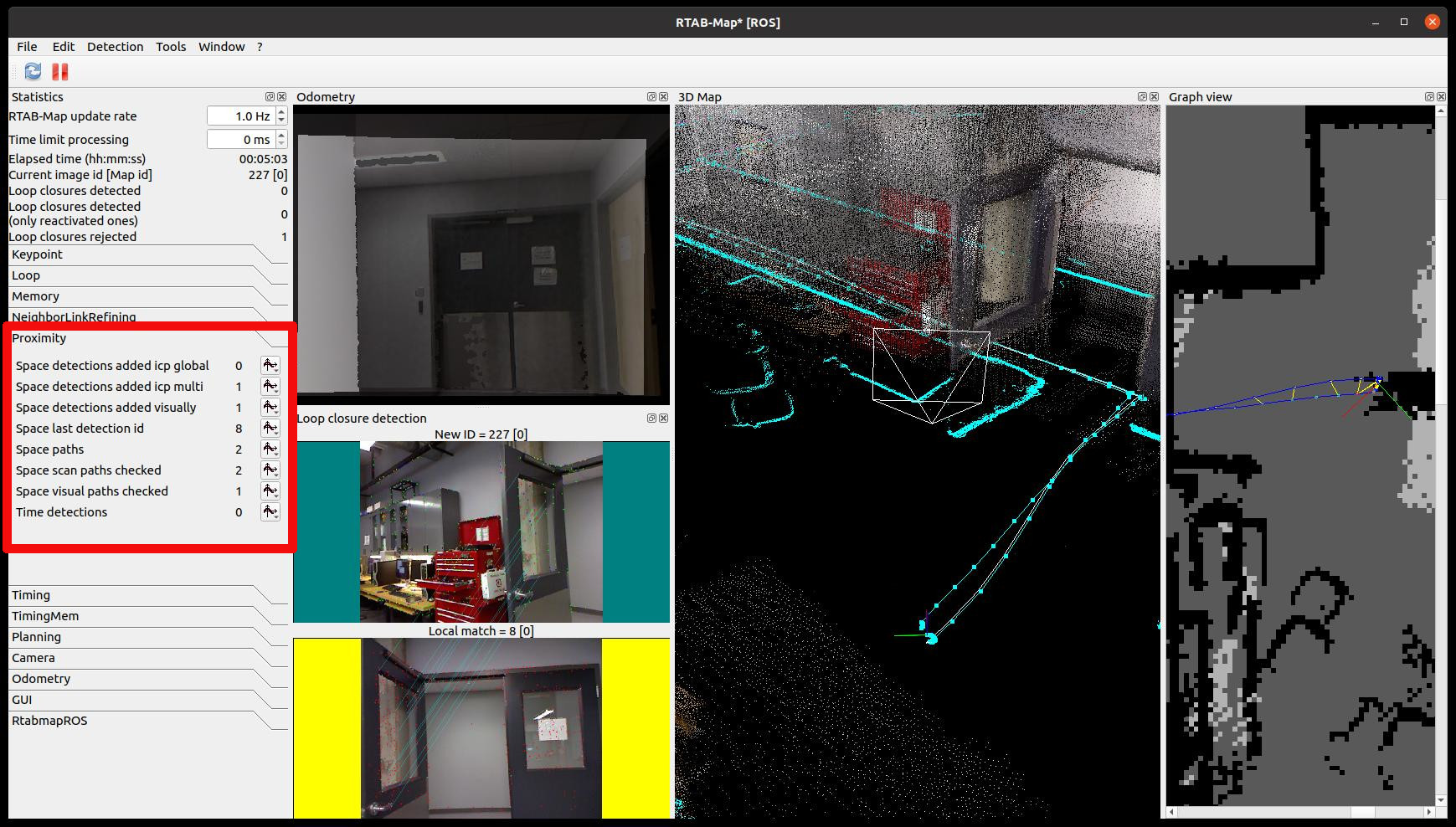
In rtabmapviz under Statistics->Proximity panel, you can know how many of each type (visual / icp) proximity detections were done (icp refers to lidar-only). The "local match" only shows the last detection (if many happened in same update).
cheers,
Mathieu

