Localization issues


|
Hi there,
After running hand-held mapping, I'm trying to localize my realsense r200 in the map. I have tryed to use both, rtabmap and rviz but with no success. First, I'm mapping with rtabmap_args:="--delete_db_on_start" and localization=false flags and after I done mapping (more then 30 locations) I run the same launch file with localization=true flag. In rtabmapviz I go to Edit>Update cache from a local database copy.. and also change Mapping to Localization in Tools. I canot see that the old map comes up to the 3D Map windows but I can see the loop closure detection windows with frames from the old map and the corrlation between them (image attached). Why rtabmap can't localize itself? it seems to have enough data. When mapping with rviz, I'm uploading the old map using Download map and then try to Download graph but then He gave me the attached error. Why is that? Thanks, Gal. Screenshot_from_2018-01-25_07-33-20.png Screenshot_from_2018-01-25_07-59-05.png |
|
Administrator
|
Hi,
For rtabmapviz bug where localization is not already checked when launching in localization mode, an issue is opened here. However, even if Mapping is checked in the UI on startup, rtabmap node is still in localization mode (when launched in localization). What is ROS and rtabmap version used? I cannot reproduce the problem. In your screenshot, the loop closure is rejected. If the loop closure is accepted (green background), the old map should re-appear. If the loop closures are all rejected, look at the terminal for more info about why they are rejected. cheers, Mathieu |
|
|
HI,
I'm using ROS Kinetic and rtabmap 0.11.13 with realsense R200 hend-hald I noticed that even in a regualar mapping the loop closure is rejected. This is the output: [ INFO] [1517165791.534762794]: Odom: quality=103, std dev=0.013446m|0.012183rad, update time=0.046305s [ INFO] [1517165791.885154014]: rtabmap (460): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1334s, Maps update=0.0063s pub=0.0004s (local map=10, WM=10) [ INFO] [1517165792.008735531]: Odom: quality=99, std dev=0.006939m|0.008616rad, update time=0.043776s [ WARN] (2018-01-28 20:56:32.345) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:32.345) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (461) doesn't have laser scan. [ERROR] (2018-01-28 20:56:32.360) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[461]=0 old[1]=0) [ INFO] [1517165792.370160382]: rtabmap (461): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1505s, Maps update=0.0062s pub=0.0005s (local map=10, WM=10) [ INFO] [1517165792.949474399]: Odom: quality=105, std dev=0.003471m|0.006871rad, update time=0.044504s [ INFO] [1517165792.994883641]: Odom: quality=85, std dev=0.010181m|0.011419rad, update time=0.043464s [ WARN] (2018-01-28 20:56:33.114) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:33.114) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (462) doesn't have laser scan. [ INFO] [1517165793.136322119]: rtabmap (462): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1341s, Maps update=0.0065s pub=0.0005s (local map=10, WM=10) [ INFO] [1517165793.423346978]: Odom: quality=125, std dev=0.005821m|0.007175rad, update time=0.047680s [ WARN] (2018-01-28 20:56:33.554) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:33.555) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:33.573) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[1]=0) [ INFO] [1517165793.583701960]: rtabmap (463): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1518s, Maps update=0.0072s pub=0.0005s (local map=11, WM=11) [ INFO] [1517165793.900300317]: Odom: quality=112, std dev=0.004162m|0.000616rad, update time=0.045256s [ WARN] (2018-01-28 20:56:34.235) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:34.235) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (464) doesn't have laser scan. [ERROR] (2018-01-28 20:56:34.253) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[464]=0 old[1]=0) [ WARN] (2018-01-28 20:56:34.254) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 464: Laser scans empty?!? (new[464]=0 old[1]=0) [ WARN] (2018-01-28 20:56:34.254) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:34.254) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (464) doesn't have laser scan. [ERROR] (2018-01-28 20:56:34.275) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[464]=0 old[438]=0) [ INFO] [1517165794.286614073]: rtabmap (464): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1719s, Maps update=0.0075s pub=0.0006s (local map=11, WM=11) [ INFO] [1517165794.836945827]: Odom: quality=158, std dev=0.003323m|0.002265rad, update time=0.046180s [ INFO] [1517165794.903298354]: Odom: quality=182, std dev=0.003451m|0.002291rad, update time=0.064429s [ WARN] (2018-01-28 20:56:35.034) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:35.034) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:35.054) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:35.054) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 463: Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:35.054) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:35.054) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:35.077) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[438]=0) [ INFO] [1517165795.088555333]: rtabmap (465): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1774s, Maps update=0.0075s pub=0.0004s (local map=11, WM=11) [ INFO] [1517165795.311290161]: Odom: quality=143, std dev=0.003066m|0.001998rad, update time=0.045393s [ WARN] (2018-01-28 20:56:35.431) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:35.431) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:35.449) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:35.449) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 463: Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:35.449) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:35.449) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:35.468) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[438]=0) [ INFO] [1517165795.478935315]: rtabmap (466): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1591s, Maps update=0.0073s pub=0.0004s (local map=11, WM=11) [ INFO] [1517165795.784852347]: Odom: quality=153, std dev=0.002962m|0.002178rad, update time=0.041636s [ WARN] (2018-01-28 20:56:36.108) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:36.108) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (467) doesn't have laser scan. [ERROR] (2018-01-28 20:56:36.125) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[467]=0 old[1]=0) [ WARN] (2018-01-28 20:56:36.125) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 467: Laser scans empty?!? (new[467]=0 old[1]=0) [ WARN] (2018-01-28 20:56:36.125) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:36.125) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (467) doesn't have laser scan. [ INFO] [1517165796.158316613]: rtabmap (467): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1590s, Maps update=0.0079s pub=0.0004s (local map=11, WM=11) [ INFO] [1517165796.275704819]: Odom: quality=156, std dev=0.002078m|0.001343rad, update time=0.064976s [ WARN] (2018-01-28 20:56:36.586) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:36.586) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:36.606) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:36.606) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 463: Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:36.606) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:36.606) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:36.628) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[438]=0) [ INFO] [1517165796.639201593]: rtabmap (468): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1625s, Maps update=0.0073s pub=0.0004s (local map=11, WM=11) [ INFO] [1517165796.731677839]: Odom: quality=139, std dev=0.002379m|0.001480rad, update time=0.046040s [ WARN] (2018-01-28 20:56:37.064) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:37.064) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (469) doesn't have laser scan. [ERROR] (2018-01-28 20:56:37.081) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[469]=0 old[1]=0) [ WARN] (2018-01-28 20:56:37.082) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 469: Laser scans empty?!? (new[469]=0 old[1]=0) [ WARN] (2018-01-28 20:56:37.082) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:37.082) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (469) doesn't have laser scan. [ERROR] (2018-01-28 20:56:37.100) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[469]=0 old[438]=0) [ INFO] [1517165797.112224152]: rtabmap (469): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1676s, Maps update=0.0076s pub=0.0006s (local map=11, WM=11) [ INFO] [1517165797.231026083]: Odom: quality=159, std dev=0.002204m|0.001593rad, update time=0.078528s [ WARN] (2018-01-28 20:56:37.527) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:37.527) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:37.547) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:37.547) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 463: Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:37.548) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:37.548) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:37.566) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[438]=0) [ INFO] [1517165797.573222891]: rtabmap (470): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1593s, Maps update=0.0043s pub=0.0005s (local map=11, WM=11) [ INFO] [1517165797.673704950]: Odom: quality=146, std dev=0.002905m|0.001866rad, update time=0.044818s [ WARN] (2018-01-28 20:56:38.013) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:38.013) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (471) doesn't have laser scan. [ERROR] (2018-01-28 20:56:38.028) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[471]=0 old[1]=0) [ WARN] (2018-01-28 20:56:38.029) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 471: Laser scans empty?!? (new[471]=0 old[1]=0) [ WARN] (2018-01-28 20:56:38.029) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:38.029) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (471) doesn't have laser scan. [ERROR] (2018-01-28 20:56:38.047) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[471]=0 old[438]=0) [ INFO] [1517165798.059036486]: rtabmap (471): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1675s, Maps update=0.0074s pub=0.0004s (local map=11, WM=11) [ INFO] [1517165798.177710143]: Odom: quality=159, std dev=0.003524m|0.002434rad, update time=0.081196s [ WARN] (2018-01-28 20:56:38.472) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:38.473) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (472) doesn't have laser scan. [ERROR] (2018-01-28 20:56:38.490) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[472]=0 old[1]=0) [ WARN] (2018-01-28 20:56:38.490) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 472: Laser scans empty?!? (new[472]=0 old[1]=0) [ WARN] (2018-01-28 20:56:38.490) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:38.490) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (472) doesn't have laser scan. [ERROR] (2018-01-28 20:56:38.510) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[472]=0 old[438]=0) [ INFO] [1517165798.521473858]: rtabmap (472): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1606s, Maps update=0.0076s pub=0.0004s (local map=11, WM=11) [ INFO] [1517165798.631337525]: Odom: quality=160, std dev=0.003890m|0.002782rad, update time=0.055469s [ WARN] (2018-01-28 20:56:38.958) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (1) doesn't have laser scan. [ WARN] (2018-01-28 20:56:38.958) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:38.979) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:38.979) Rtabmap.cpp:1786::process() Rejected loop closure 1 -> 463: Laser scans empty?!? (new[463]=0 old[1]=0) [ WARN] (2018-01-28 20:56:38.980) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:38.980) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:39.004) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[438]=0) [ INFO] [1517165799.015727915]: rtabmap (473): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1849s, Maps update=0.0077s pub=0.0005s (local map=11, WM=11) [ INFO] [1517165799.101899071]: Odom: quality=162, std dev=0.003750m|0.002654rad, update time=0.058851s [ WARN] (2018-01-28 20:56:39.428) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:39.428) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (474) doesn't have laser scan. [ERROR] (2018-01-28 20:56:39.446) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[474]=0 old[438]=0) [ WARN] (2018-01-28 20:56:39.447) Rtabmap.cpp:1786::process() Rejected loop closure 438 -> 474: Laser scans empty?!? (new[474]=0 old[438]=0) [ WARN] (2018-01-28 20:56:39.447) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:39.447) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (474) doesn't have laser scan. [ERROR] (2018-01-28 20:56:39.464) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[474]=0 old[438]=0) [ INFO] [1517165799.471225243]: rtabmap (474): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1655s, Maps update=0.0045s pub=0.0003s (local map=11, WM=11) [ INFO] [1517165799.581931310]: Odom: quality=143, std dev=0.004699m|0.005868rad, update time=0.063289s [ WARN] (2018-01-28 20:56:39.889) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:39.889) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:39.900) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[438]=0) [ WARN] (2018-01-28 20:56:39.900) Rtabmap.cpp:1786::process() Rejected loop closure 438 -> 463: Laser scans empty?!? (new[463]=0 old[438]=0) [ WARN] (2018-01-28 20:56:39.901) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:39.901) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (463) doesn't have laser scan. [ERROR] (2018-01-28 20:56:39.912) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[463]=0 old[438]=0) [ INFO] [1517165799.918932812]: rtabmap (475): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1420s, Maps update=0.0042s pub=0.0003s (local map=11, WM=11) [ INFO] [1517165800.198115796]: Odom: quality=139, std dev=0.004394m|0.002864rad, update time=0.046886s [ INFO] [1517165800.511499750]: Odom: quality=132, std dev=0.002709m|0.005326rad, update time=0.045958s [ WARN] (2018-01-28 20:56:40.633) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:40.633) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (476) doesn't have laser scan. [ERROR] (2018-01-28 20:56:40.653) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[476]=0 old[438]=0) [ WARN] (2018-01-28 20:56:40.654) Rtabmap.cpp:1786::process() Rejected loop closure 438 -> 476: Laser scans empty?!? (new[476]=0 old[438]=0) [ WARN] (2018-01-28 20:56:40.654) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:40.654) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (476) doesn't have laser scan. [ERROR] (2018-01-28 20:56:40.669) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[476]=0 old[438]=0) [ INFO] [1517165800.679136161]: rtabmap (476): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1598s, Maps update=0.0067s pub=0.0005s (local map=11, WM=11) [ INFO] [1517165800.979308164]: Odom: quality=138, std dev=0.004766m|0.005903rad, update time=0.042107s [ WARN] (2018-01-28 20:56:41.099) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:41.099) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (477) doesn't have laser scan. [ERROR] (2018-01-28 20:56:41.115) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[477]=0 old[438]=0) [ WARN] (2018-01-28 20:56:41.115) Rtabmap.cpp:1786::process() Rejected loop closure 438 -> 477: Laser scans empty?!? (new[477]=0 old[438]=0) [ WARN] (2018-01-28 20:56:41.116) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (438) doesn't have laser scan. [ WARN] (2018-01-28 20:56:41.116) SensorData.cpp:717::uncompressDataConst() Requested laser scan data, but the sensor data (477) doesn't have laser scan. [ERROR] (2018-01-28 20:56:41.127) RegistrationIcp.cpp:404::computeTransformationImpl() Laser scans empty?!? (new[477]=0 old[438]=0) [ INFO] [1517165801.136642768]: rtabmap (477): Rate=0.00s, Limit=0.000s, RTAB-Map=0.1496s, Maps update=0.0061s pub=0.0004s (local map=12, WM=12) [ INFO] [1517165801.466235794]: Odom: quality=120, std dev=0.002724m|0.001805rad, update time=0.056181s |
|
Administrator
|
Hi,
Rtabmap complains about empty laser scans. Did you set Reg/Strategy to 1 or 2? Set it to 0. Cheers, Mathieu |
|
|
Yep.. Reg/Strategy was 1. Thanks for that.
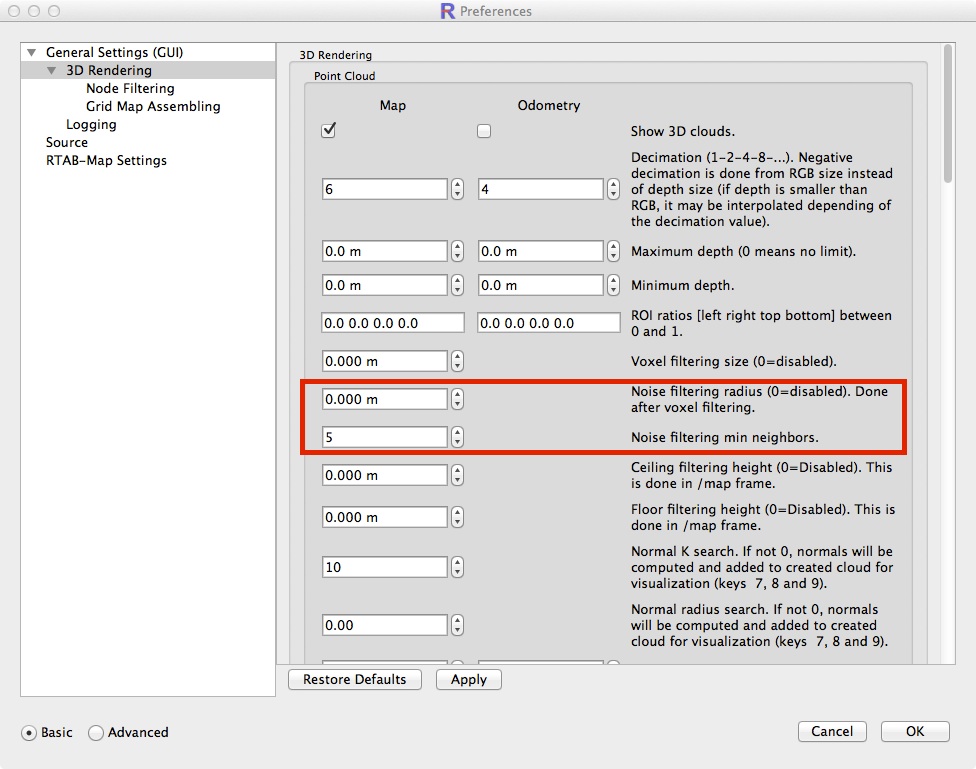
If we already talke about parameters.. is there any good way to filter all the false positive single points in the attached picture? I'm allready using: param name="Grid/NoiseFilteringRadius" type="string" value="0.1" param name="Grid/NoiseFilteringMinNeighbors" type="string" value="10" but I dont think it's effecting. Screenshot_from_2018-01-29_00-27-24.png |
|
Administrator
|
Hi,
For the 3D Map view, this is a point cloud created using parameters from Preferences->General Settings->3D Rendering. You will find similar noise parameters too. The "Grid/" parameters are used when creating the occupancy grid map. cheers, Mathieu |
|
|
NoFIlter.png
Filter0.png FIlter0.png Thanks, It does help a lot but there are still some noise left, there is another way to filter this out? |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |