Hi,
The approach in your referred
link is obsolete (june 2015). It doesn't work with the new versions, I tried as is and I reproduced your error or it crashed at another place.
I did a revision of the code to make RGB-only localization working with a pre-built map. This new approach works from this
commit:
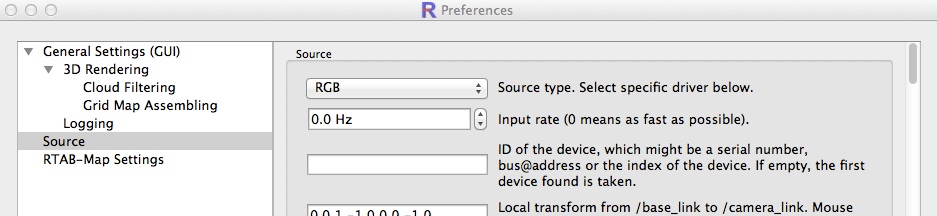
1- Open RTAB-Map->Preferences, then reset all settings to default to start clean.
2- In Source panel, select your RGB-D or stereo sensor in order to create the 3D map.
3- [Optional but this will increase localization success] In RTAB-Map panel, set Detection Rate to 0 Hz (to add all frames to map). Only do this on small environments as the map size will increase very fast.
3- [Optional] In Vocabulary panel, check "Use odometry features" to use same parameters for the map than odometry.
4- Start mapping.
5- Close/Save the database (this will be our fixed map)
6- Re-open the database you just saved
7- Open Preferences: A) In RTAB-Map panel, set Detection Rate to 0 Hz (if not already set)
and uncheck SLAM Mode. B) In General settings (GUI), check "Odometry disabled". C) In Visual Registration panel, select 3D to 2D motion estimation approach.
8- Before trying an other camera than one used for mapping, you can go in Source panel under RGB-D section and check "Only RGB images are published". This will simulate a RGB-only camera using your current calibration.
9- Start detection. The camera should be able to localize on the map at this point.
10- If 9 is working, you can now try another RGB-only camera in the Source panel (e.g., standard USB camera). You will have to calibrate it (see Calibrate button in Source panel) if not yet calibrated.
11- If you restart the camera (stop/start), localization would start again.
cheers,
Mathieu