Loop Closure Parameters


|
This post was updated on .
CONTENTS DELETED
The author has deleted this message.
|
|
Administrator
|
Not sure to understand what you are referring by increasing time for loop closure. Yes, rtabmap will automatically close loops when they are detected. The detection rate is 1 Hz by default (Rtabmap/DetectionRate parameter), is it the frequency that you want to decrease?
You can also increase the STM size (Mem/STMSize parameter) to avoid loop closures on nodes that were just seen. cheers, Mathieu |
|
|
This post was updated on .
CONTENTS DELETED
The author has deleted this message.
|
|
|
This post was updated on .
In reply to this post by matlabbe
Hello matlabbe,
I am trying to map 20 m by 20 m area with a rover. The problem I was facing is that when I tried to map all the area at once. There was a loop closures at different locations than where it supposed to. It warped the map very badly. The reason could be lack of enough differentiating textures. So, I navigate a certain region and come back to the place where I started to enforce the loop closure. It did work for me. However, there are few corners showing up in my map. I have attached the image and database along with the code. Can you please help me figure out the problem? code:
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="rtabmapviz" default="false" />
<arg name="rviz" default="true" />
<arg name="localization" default="false"/>
<arg name="pi/2" value="1.5707963267948966" />
<arg name="optical_rotate" value="0 0 0 -$(arg pi/2) 0 -$(arg pi/2) " />
<arg name="optical_rotate2" value="0 0 0 -$(arg pi/2) 0 -$(arg pi/2) " />
<node pkg="tf2_ros" type="static_transform_publisher" name="camera_chassis"
args="$(arg optical_rotate) chassis camera" />
<group ns="/stereo" >
<node pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc"/>
<node pkg="rtabmap_odom" type="stereo_odometry" name="stereo_odometry" output="screen">
<remap from="left/image_rect" to="left/image_rect_color"/>
<remap from="right/image_rect" to="right/image_rect"/>
<remap from="left/camera_info" to="left/camera_info"/>
<remap from="right/camera_info" to="right/camera_info"/>
</node>
</group>
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_slam" type="rtabmap" output="screen" args="delete_db_on_start">
<remap from="left/image_rect" to="/stereo/left/image_raw"/>
<remap from="right/image_rect" to="/stereo/right/image_raw"/>
<remap from="left/camera_info" to="/stereo/left/camera_info"/>
<remap from="right/camera_info" to="/stereo/right/camera_info"/>
<remap from="odom" to="/stereo/odom"/>
</node>
</group>
<node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_demos)/launch/config/demo_stereo_outdoor.rviz"/>
</launch>
Image: 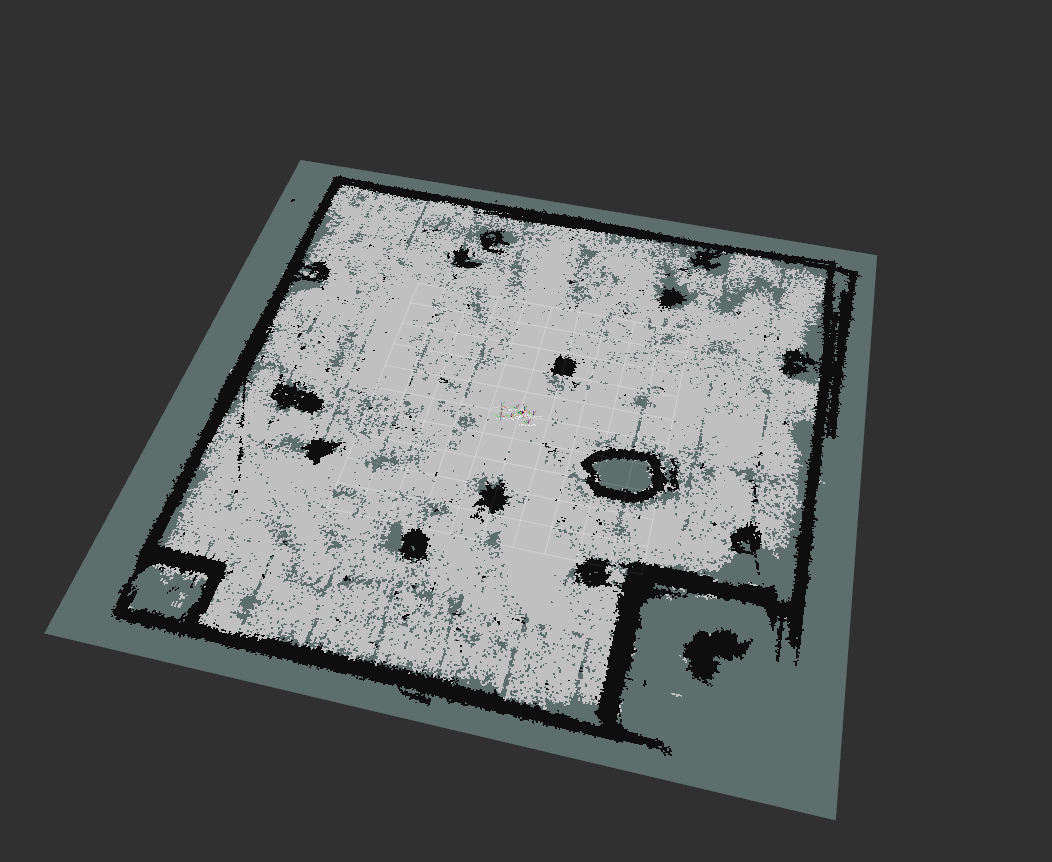 Database: rtabmap-info /home/rakesh/.ros/rtabmap_best_so_far.db Parameters (Yellow=modified, Red=old parameter not used anymore, NA=not in database): BRIEF/Bytes= 32 BRISK/Octaves= 3 BRISK/PatternScale= 1 BRISK/Thresh= 30 Bayes/FullPredictionUpdate= false Bayes/PredictionLC= 0.1 0.36 0.30 0.16 0.062 0.0151 0.00255 0.000324 2.5e-05 1.3e-06 4.8e-08 1.2e-09 1.9e-11 2.2e-13 1.7e-15 8.5e-18 2.9e-20 6.9e-23 Bayes/VirtualPlacePriorThr= 0.9 DbSqlite3/CacheSize= 10000 DbSqlite3/InMemory= false DbSqlite3/JournalMode= 3 DbSqlite3/Synchronous= 0 DbSqlite3/TempStore= 2 FAST/CV= 0 FAST/Gpu= false FAST/GpuKeypointsRatio= 0.05 FAST/GridCols= 0 FAST/GridRows= 0 FAST/MaxThreshold= 200 FAST/MinThreshold= 7 FAST/NonmaxSuppression= true FAST/Threshold= 20 FREAK/NOctaves= 4 FREAK/OrientationNormalized= true FREAK/PatternScale= 22 FREAK/ScaleNormalized= true GFTT/BlockSize= 3 GFTT/K= 0.04 GFTT/MinDistance= 7 GFTT/QualityLevel= 0.001 GFTT/UseHarrisDetector= false GMS/ThresholdFactor= 6.0 GMS/WithRotation= false GMS/WithScale= false GTSAM/Optimizer= 1 Grid/3D= true Grid/CellSize= 0.05 Grid/ClusterRadius= 0.1 Grid/DepthDecimation= 4 Grid/DepthRoiRatios= 0.0 0.0 0.0 0.0 Grid/FlatObstacleDetected= true Grid/FootprintHeight= 0.0 Grid/FootprintLength= 0.0 Grid/FootprintWidth= 0.0 Grid/GroundIsObstacle= false Grid/MapFrameProjection= false Grid/MaxGroundAngle= 45 Grid/MaxGroundHeight= 0.0 Grid/MaxObstacleHeight= 0.0 Grid/MinClusterSize= 10 Grid/MinGroundHeight= 0.0 Grid/NoiseFilteringMinNeighbors= 5 Grid/NoiseFilteringRadius= 0.0 Grid/NormalK= 20 Grid/NormalsSegmentation= true Grid/PreVoxelFiltering= true Grid/RangeMax= 5.0 Grid/RangeMin= 0.0 Grid/RayTracing= false Grid/Scan2dUnknownSpaceFilled= false Grid/ScanDecimation= 1 Grid/Sensor= 1 GridGlobal/AltitudeDelta= 0 GridGlobal/Eroded= false GridGlobal/FloodFillDepth= 0 GridGlobal/FootprintRadius= 0.0 GridGlobal/FullUpdate= true GridGlobal/MaxNodes= 0 GridGlobal/MinSize= 0.0 GridGlobal/OccupancyThr= 0.5 GridGlobal/ProbClampingMax= 0.971 GridGlobal/ProbClampingMin= 0.1192 GridGlobal/ProbHit= 0.7 GridGlobal/ProbMiss= 0.4 GridGlobal/UpdateError= 0.01 Icp/CCFilterOutFarthestPoints= false Icp/CCMaxFinalRMS= 0.2 Icp/CCSamplingLimit= 50000 Icp/CorrespondenceRatio= 0.1 Icp/DownsamplingStep= 1 Icp/Epsilon= 0 Icp/Force4DoF= false Icp/Iterations= 30 Icp/MaxCorrespondenceDistance= 0.1 Icp/MaxRotation= 0.78 Icp/MaxTranslation= 0.2 Icp/OutlierRatio= 0.85 Icp/PMMatcherEpsilon= 0.0 Icp/PMMatcherIntensity= false Icp/PMMatcherKnn= 1 Icp/PointToPlane= true Icp/PointToPlaneGroundNormalsUp= 0.0 Icp/PointToPlaneK= 5 Icp/PointToPlaneLowComplexityStrategy=1 Icp/PointToPlaneMinComplexity= 0.02 Icp/PointToPlaneRadius= 0.0 Icp/RangeMax= 0 Icp/RangeMin= 0 Icp/ReciprocalCorrespondences= true Icp/Strategy= 1 Icp/VoxelSize= 0.05 ImuFilter/ComplementaryBiasAlpha= 0.01 ImuFilter/ComplementaryDoAdpativeGain=true ImuFilter/ComplementaryDoBiasEstimation=true ImuFilter/ComplementaryGainAcc= 0.01 ImuFilter/MadgwickGain= 0.1 ImuFilter/MadgwickZeta= 0.0 KAZE/Diffusivity= 1 KAZE/Extended= false KAZE/NOctaveLayers= 4 KAZE/NOctaves= 4 KAZE/Threshold= 0.001 KAZE/Upright= false Kp/BadSignRatio= 0.5 Kp/ByteToFloat= false Kp/DetectorStrategy= 8 Kp/FlannRebalancingFactor= 2.0 Kp/GridCols= 1 Kp/GridRows= 1 Kp/IncrementalDictionary= true Kp/IncrementalFlann= true Kp/MaxDepth= 2 (default=0) Kp/MaxFeatures= 500 Kp/MinDepth= 0 Kp/NNStrategy= 1 Kp/NewWordsComparedTogether= true Kp/NndrRatio= 0.8 Kp/Parallelized= true Kp/RoiRatios= 0.0 0.0 0.0 0.0 Kp/SubPixEps= 0.02 Kp/SubPixIterations= 0 Kp/SubPixWinSize= 3 Kp/TfIdfLikelihoodUsed= true Marker/CornerRefinementMethod= 0 Marker/Dictionary= 0 Marker/Length= 0 Marker/MaxDepthError= 0.01 Marker/MaxRange= 0.0 Marker/MinRange= 0.0 Marker/PriorsVarianceAngular= 0.001 Marker/PriorsVarianceLinear= 0.001 Marker/VarianceAngular= 0.01 Marker/VarianceLinear= 0.001 Mem/BadSignaturesIgnored= false Mem/BinDataKept= true Mem/CompressionParallelized= true Mem/CovOffDiagIgnored= true Mem/DepthAsMask= true Mem/GenerateIds= true Mem/ImageCompressionFormat= .jpg Mem/ImageKept= false Mem/ImagePostDecimation= 1 Mem/ImagePreDecimation= 1 Mem/IncrementalMemory= true Mem/InitWMWithAllNodes= false Mem/IntermediateNodeDataKept= false Mem/LaserScanDownsampleStepSize= 1 Mem/LaserScanNormalK= 0 Mem/LaserScanNormalRadius= 0.0 Mem/LaserScanVoxelSize= 0.0 Mem/LocalizationDataSaved= false Mem/MapLabelsAdded= true Mem/NotLinkedNodesKept= true Mem/RawDescriptorsKept= true Mem/RecentWmRatio= 0.2 Mem/ReduceGraph= false Mem/RehearsalIdUpdatedToNewOne= false Mem/RehearsalSimilarity= 0.30 (default=0.6) Mem/RehearsalWeightIgnoredWhileMoving=false Mem/STMSize= 10 Mem/SaveDepth16Format= false Mem/StereoFromMotion= false Mem/TransferSortingByWeightId= false Mem/UseOdomFeatures= true Mem/UseOdomGravity= false ORB/EdgeThreshold= 19 ORB/FirstLevel= 0 ORB/Gpu= false ORB/NLevels= 3 ORB/PatchSize= 31 ORB/ScaleFactor= 2 ORB/ScoreType= 0 ORB/WTA_K= 2 Odom/AlignWithGround= false Odom/FillInfoData= true Odom/FilteringStrategy= 0 Odom/GuessMotion= true Odom/GuessSmoothingDelay= 0 Odom/Holonomic= true Odom/ImageBufferSize= 1 Odom/ImageDecimation= 1 Odom/KalmanMeasurementNoise= 0.01 Odom/KalmanProcessNoise= 0.001 Odom/KeyFrameThr= 0.3 Odom/ParticleLambdaR= 100 Odom/ParticleLambdaT= 100 Odom/ParticleNoiseR= 0.002 Odom/ParticleNoiseT= 0.002 Odom/ParticleSize= 400 Odom/ResetCountdown= 0 Odom/ScanKeyFrameThr= 0.9 Odom/Strategy= 0 Odom/VisKeyFrameThr= 150 OdomF2M/BundleAdjustment= 1 OdomF2M/BundleAdjustmentMaxFrames= 10 OdomF2M/MaxNewFeatures= 0 OdomF2M/MaxSize= 2000 OdomF2M/ScanMaxSize= 2000 OdomF2M/ScanRange= 0 OdomF2M/ScanSubtractAngle= 45 OdomF2M/ScanSubtractRadius= 0.05 OdomF2M/ValidDepthRatio= 0.75 OdomFovis/BucketHeight= 80 OdomFovis/BucketWidth= 80 OdomFovis/CliqueInlierThreshold= 0.1 OdomFovis/FastThreshold= 20 OdomFovis/FastThresholdAdaptiveGain=0.005 OdomFovis/FeatureSearchWindow= 25 OdomFovis/FeatureWindowSize= 9 OdomFovis/InlierMaxReprojectionError=1.5 OdomFovis/MaxKeypointsPerBucket= 25 OdomFovis/MaxMeanReprojectionError=10.0 OdomFovis/MaxPyramidLevel= 3 OdomFovis/MinFeaturesForEstimate= 20 OdomFovis/MinPyramidLevel= 0 OdomFovis/StereoMaxDisparity= 128 OdomFovis/StereoMaxDistEpipolarLine=1.5 OdomFovis/StereoMaxRefinementDisplacement=1.0 OdomFovis/StereoRequireMutualMatch=true OdomFovis/TargetPixelsPerFeature= 250 OdomFovis/UpdateTargetFeaturesWithRefined=false OdomFovis/UseAdaptiveThreshold= true OdomFovis/UseBucketing= true OdomFovis/UseHomographyInitialization=true OdomFovis/UseImageNormalization= false OdomFovis/UseSubpixelRefinement= true OdomLOAM/AngVar= 0.01 OdomLOAM/LinVar= 0.01 OdomLOAM/LocalMapping= true OdomLOAM/Resolution= 0.2 OdomLOAM/ScanPeriod= 0.1 OdomLOAM/Sensor= 2 OdomMSCKF/FastThreshold= 10 OdomMSCKF/GridCol= 5 OdomMSCKF/GridMaxFeatureNum= 4 OdomMSCKF/GridMinFeatureNum= 3 OdomMSCKF/GridRow= 4 OdomMSCKF/InitCovAccBias= 0.01 OdomMSCKF/InitCovExRot= 0.00030462 OdomMSCKF/InitCovExTrans= 0.000025 OdomMSCKF/InitCovGyroBias= 0.01 OdomMSCKF/InitCovVel= 0.25 OdomMSCKF/MaxCamStateSize= 20 OdomMSCKF/MaxIteration= 30 OdomMSCKF/NoiseAcc= 0.05 OdomMSCKF/NoiseAccBias= 0.01 OdomMSCKF/NoiseFeature= 0.035 OdomMSCKF/NoiseGyro= 0.005 OdomMSCKF/NoiseGyroBias= 0.001 OdomMSCKF/OptTranslationThreshold= 0 OdomMSCKF/PatchSize= 15 OdomMSCKF/PositionStdThreshold= 8.0 OdomMSCKF/PyramidLevels= 3 OdomMSCKF/RansacThreshold= 3 OdomMSCKF/RotationThreshold= 0.2618 OdomMSCKF/StereoThreshold= 5 OdomMSCKF/TrackPrecision= 0.01 OdomMSCKF/TrackingRateThreshold= 0.5 OdomMSCKF/TranslationThreshold= 0.4 OdomMono/InitMinFlow= 100 OdomMono/InitMinTranslation= 0.1 OdomMono/MaxVariance= 0.01 OdomMono/MinTranslation= 0.02 OdomORBSLAM/Bf= 0.076 OdomORBSLAM/Fps= 0.0 OdomORBSLAM/MapSize= 3000 OdomORBSLAM/MaxFeatures= 1000 OdomORBSLAM/ThDepth= 40.0 OdomOpen3D/MaxDepth= 3.0 OdomOpen3D/Method= 0 OdomViso2/BucketHeight= 50 OdomViso2/BucketMaxFeatures= 2 OdomViso2/BucketWidth= 50 OdomViso2/InlierThreshold= 2.0 OdomViso2/MatchBinsize= 50 OdomViso2/MatchDispTolerance= 2 OdomViso2/MatchHalfResolution= true OdomViso2/MatchMultiStage= true OdomViso2/MatchNmsN= 3 OdomViso2/MatchNmsTau= 50 OdomViso2/MatchOutlierDispTolerance=5 OdomViso2/MatchOutlierFlowTolerance=5 OdomViso2/MatchRadius= 200 OdomViso2/MatchRefinement= 1 OdomViso2/RansacIters= 200 OdomViso2/Reweighting= true Optimizer/Epsilon= 0.0 Optimizer/GravitySigma= 0.3 Optimizer/Iterations= 20 Optimizer/LandmarksIgnored= false Optimizer/PriorsIgnored= true Optimizer/Robust= false Optimizer/Strategy= 1 Optimizer/VarianceIgnored= false PyDetector/Cuda= true PyMatcher/Cuda= true PyMatcher/Iterations= 20 PyMatcher/Model= indoor PyMatcher/Threshold= 0.2 RGBD/AngularSpeedUpdate= 0.0 RGBD/AngularUpdate= 0.1 RGBD/CreateOccupancyGrid= true (default=false) RGBD/Enabled= true RGBD/GoalReachedRadius= 0.5 RGBD/GoalsSavedInUserData= false RGBD/InvertedReg= false RGBD/LinearSpeedUpdate= 0.0 RGBD/LinearUpdate= 0.1 RGBD/LocalBundleOnLoopClosure= false RGBD/LocalImmunizationRatio= 0.25 RGBD/LocalRadius= 10 RGBD/LoopClosureIdentityGuess= false RGBD/LoopClosureReextractFeatures= false RGBD/LoopCovLimited= false RGBD/MarkerDetection= false RGBD/MaxLocalRetrieved= 2 RGBD/MaxLoopClosureDistance= 0.0 RGBD/MaxOdomCacheSize= 10 RGBD/NeighborLinkRefining= false RGBD/NewMapOdomChangeDistance= 0 RGBD/OptimizeFromGraphEnd= false RGBD/OptimizeMaxError= 3.0 RGBD/PlanAngularVelocity= 0 RGBD/PlanLinearVelocity= 0 RGBD/PlanStuckIterations= 0 RGBD/ProximityAngle= 45 RGBD/ProximityBySpace= false (default=true) RGBD/ProximityByTime= false RGBD/ProximityGlobalScanMap= false RGBD/ProximityMaxGraphDepth= 50 RGBD/ProximityMaxPaths= 3 RGBD/ProximityMergedScanCovFactor= 100.0 RGBD/ProximityOdomGuess= false RGBD/ProximityPathFilteringRadius= 1 RGBD/ProximityPathMaxNeighbors= 0 RGBD/ProximityPathRawPosesUsed= true RGBD/ScanMatchingIdsSavedInLinks= true RGBD/StartAtOrigin= false Reg/Force3DoF= true (default=false) Reg/RepeatOnce= true Reg/Strategy= 0 Rtabmap/ComputeRMSE= true Rtabmap/CreateIntermediateNodes= false Rtabmap/DetectionRate= 2 (default=1) Rtabmap/ImageBufferSize= 1 Rtabmap/ImagesAlreadyRectified= true Rtabmap/LoopGPS= true Rtabmap/LoopRatio= 0 Rtabmap/LoopThr= 0.11 Rtabmap/MaxRepublished= 2 Rtabmap/MaxRetrieved= 2 Rtabmap/MemoryThr= 0 Rtabmap/PublishLastSignature= true Rtabmap/PublishLikelihood= true Rtabmap/PublishPdf= true Rtabmap/PublishRAMUsage= false Rtabmap/PublishStats= true Rtabmap/RectifyOnlyFeatures= false Rtabmap/SaveWMState= false Rtabmap/StartNewMapOnGoodSignature=false Rtabmap/StartNewMapOnLoopClosure= false Rtabmap/StatisticLogged= false Rtabmap/StatisticLoggedHeaders= true Rtabmap/StatisticLogsBufferedInRAM=true Rtabmap/TimeThr= 3000 (default=0) SIFT/ContrastThreshold= 0.04 SIFT/EdgeThreshold= 10 SIFT/NFeatures= 0 SIFT/NOctaveLayers= 3 SIFT/RootSIFT= false SIFT/Sigma= 1.6 SURF/Extended= false SURF/GpuKeypointsRatio= 0.01 SURF/GpuVersion= false SURF/HessianThreshold= 500 SURF/OctaveLayers= 2 SURF/Octaves= 4 SURF/Upright= false Stereo/DenseStrategy= 0 Stereo/Eps= 0.01 Stereo/Iterations= 30 Stereo/MaxDisparity= 128.0 Stereo/MaxLevel= 5 Stereo/MinDisparity= 0.5 Stereo/OpticalFlow= true Stereo/SSD= true Stereo/WinHeight= 3 Stereo/WinWidth= 15 StereoBM/BlockSize= 15 StereoBM/Disp12MaxDiff= -1 StereoBM/MinDisparity= 0 StereoBM/NumDisparities= 128 StereoBM/PreFilterCap= 31 StereoBM/PreFilterSize= 9 StereoBM/SpeckleRange= 4 StereoBM/SpeckleWindowSize= 100 StereoBM/TextureThreshold= 10 StereoBM/UniquenessRatio= 15 StereoSGBM/BlockSize= 15 StereoSGBM/Disp12MaxDiff= 1 StereoSGBM/MinDisparity= 0 StereoSGBM/Mode= 2 StereoSGBM/NumDisparities= 128 StereoSGBM/P1= 2 StereoSGBM/P2= 5 StereoSGBM/PreFilterCap= 31 StereoSGBM/SpeckleRange= 4 StereoSGBM/SpeckleWindowSize= 100 StereoSGBM/UniquenessRatio= 20 SuperPoint/Cuda= true SuperPoint/NMS= true SuperPoint/NMSRadius= 4 SuperPoint/Threshold= 0.010 VhEp/Enabled= false VhEp/MatchCountMin= 8 VhEp/RansacParam1= 3 VhEp/RansacParam2= 0.99 Vis/BundleAdjustment= 1 Vis/CorFlowEps= 0.01 Vis/CorFlowIterations= 30 Vis/CorFlowMaxLevel= 3 Vis/CorFlowWinSize= 16 Vis/CorGuessMatchToProjection= false Vis/CorGuessWinSize= 40 Vis/CorNNDR= 0.8 Vis/CorNNType= 1 Vis/CorType= 0 Vis/DepthAsMask= true Vis/EpipolarGeometryVar= 0.1 Vis/EstimationType= 1 Vis/FeatureType= 8 Vis/ForwardEstOnly= true Vis/GridCols= 1 Vis/GridRows= 1 Vis/InlierDistance= 0.1 Vis/Iterations= 300 Vis/MaxDepth= 0 Vis/MaxFeatures= 1000 Vis/MeanInliersDistance= 0.0 Vis/MinDepth= 0 Vis/MinInliers= 15 (default=20) Vis/MinInliersDistribution= 0.0 Vis/PnPFlags= 0 Vis/PnPMaxVariance= 0.0 Vis/PnPRefineIterations= 0 Vis/PnPReprojError= 2 Vis/RefineIterations= 5 Vis/RoiRatios= 0.0 0.0 0.0 0.0 Vis/SubPixEps= 0.02 Vis/SubPixIterations= 0 Vis/SubPixWinSize= 3 g2o/Baseline= 0.075 g2o/Optimizer= 0 g2o/PixelVariance= 1.0 g2o/RobustKernelDelta= 8 g2o/Solver= 0 Db/TargetVersion= NA (default="") Icp/DebugExportFormat= NA (default="") Icp/PMConfig= NA (default="") Kp/DictionaryPath= NA (default="") Marker/Priors= NA (default="") OdomOKVIS/ConfigPath= NA (default="") OdomORBSLAM/VocPath= NA (default="") OdomVINS/ConfigPath= NA (default="") PyDetector/Path= NA (default="") PyMatcher/Path= NA (default="") Rtabmap/WorkingDirectory= NA (default="") SuperPoint/ModelPath= NA (default="") Info: Path: /home/rakesh/.ros/rtabmap_best_so_far.db Version: 0.21.1 Sessions: 1 Total odometry length:395.392365 m Total time: 1882.601000s LTM: 3467 nodes and 855738 words (dim=32 type=8U) WM: 2353 nodes and 819438 words Global graph: 3467 poses and 4998 links Optimized graph: 2353 poses (x=4998->-9, y=8->-8, z=8->0) Maps in graph: 1/1 [0(2353)] Ground truth: 0 poses GPS: 0 poses Links: Neighbor: 4704 GlobalClosure: 294 LocalSpaceClosure:0 LocalTimeClosure: 0 UserClosure: 0 VirtualClosure: 0 NeighborMerged: 0 PosePrior: 0 Landmark: 0 Gravity: 0 Database size: 1704 MB Nodes size: 531 KB (0.03%) Links size: 1 MB (0.10%) RGB Images size: 667 MB (39.17%) Depth Images size: 616 MB (36.16%) Calibrations size: 2 MB (0.16%) Grids size: 55 MB (3.24%) Scans size: 0 Bytes (0.00%) User data size: 0 Bytes (0.00%) Dictionary size: 50 MB (2.96%) Features size: 282 MB (16.58%) Statistics size: 4 MB (0.26%) Other (indexing, unused):22 MB (1.34%) Thanks, minato_99 |
|
Administrator
|
Can you share the database?
|
|
|
Hello matlabbe,
https://drive.google.com/file/d/1Fxj2ZxOuhBNxOftIlRkBjLvVwePLDDHy/view?usp=sharing I have attached the link. Please access the database. I could not upload it because the size of the zip file is large. Thanks, minato_99 |
|
Administrator
|
In general I would use Kp/MaxDepth=0 (in your map it is 2 meters), to get better loop closure hypotheses and transformation estimation. Loop closures over larger distance can also be detected.
I see that when the computer seems to use more CPU, like during vocabulary rebalancing: 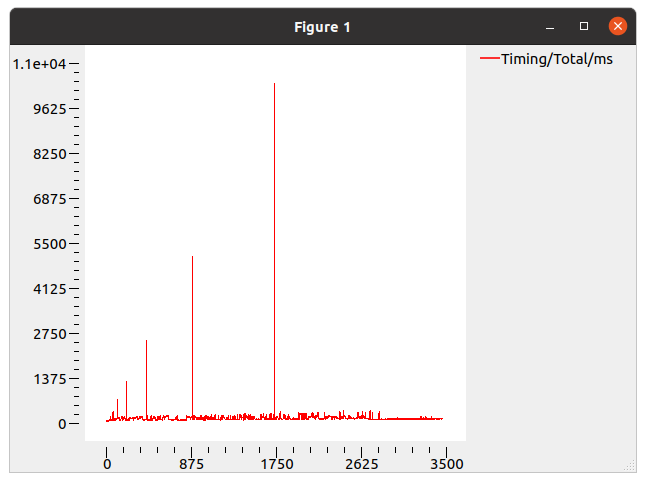 It caused some glitches like this between two consecutive nodes added to map: 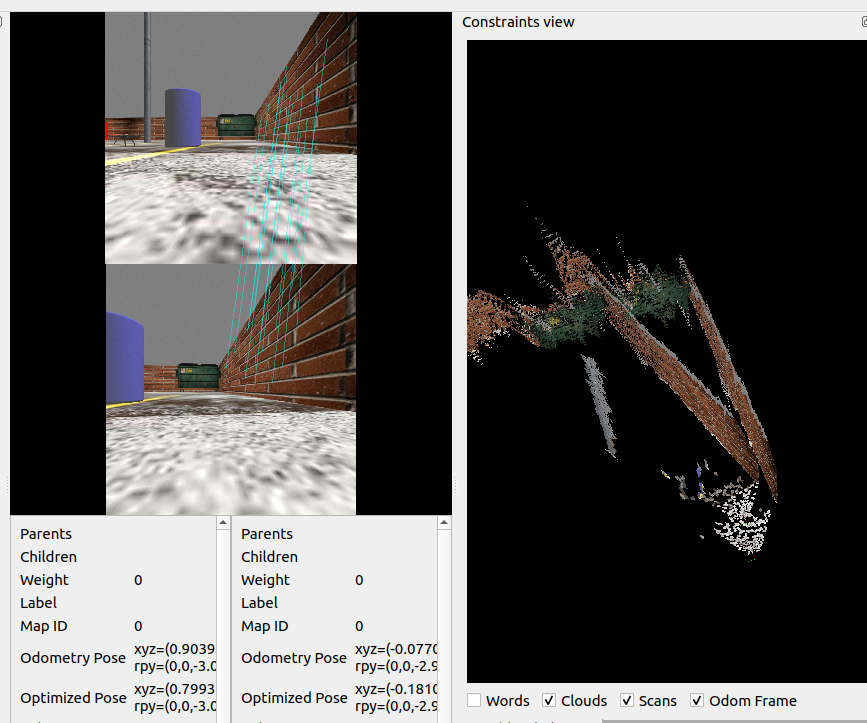 I don't know why it affected the odometry, unless the simulator itself lagged and gave poor data. The map looks relatively good otherwise. Here a comparison without and with loop closure optimization: 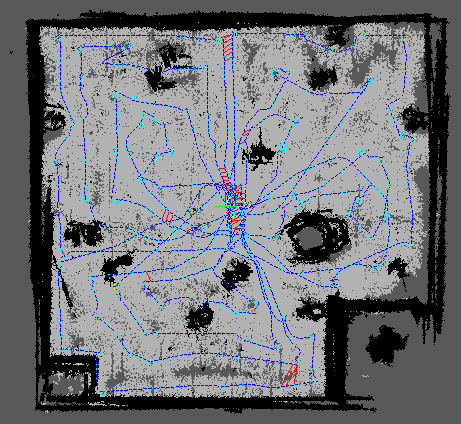 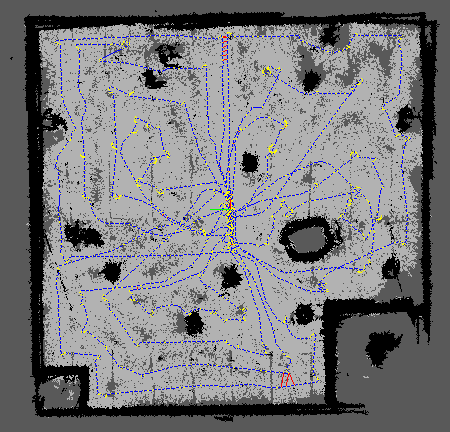 cheers, Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |