You can also try with RGBD/LoopClosureReextractFeatures = true.
The problem is that mostly all features extracted for loop closure detection are outside the depth range:
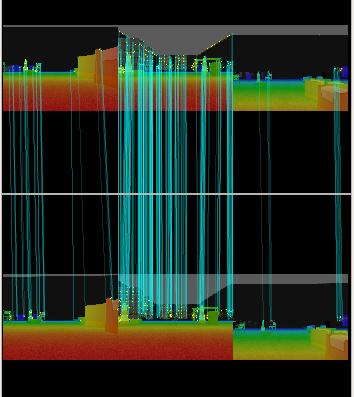
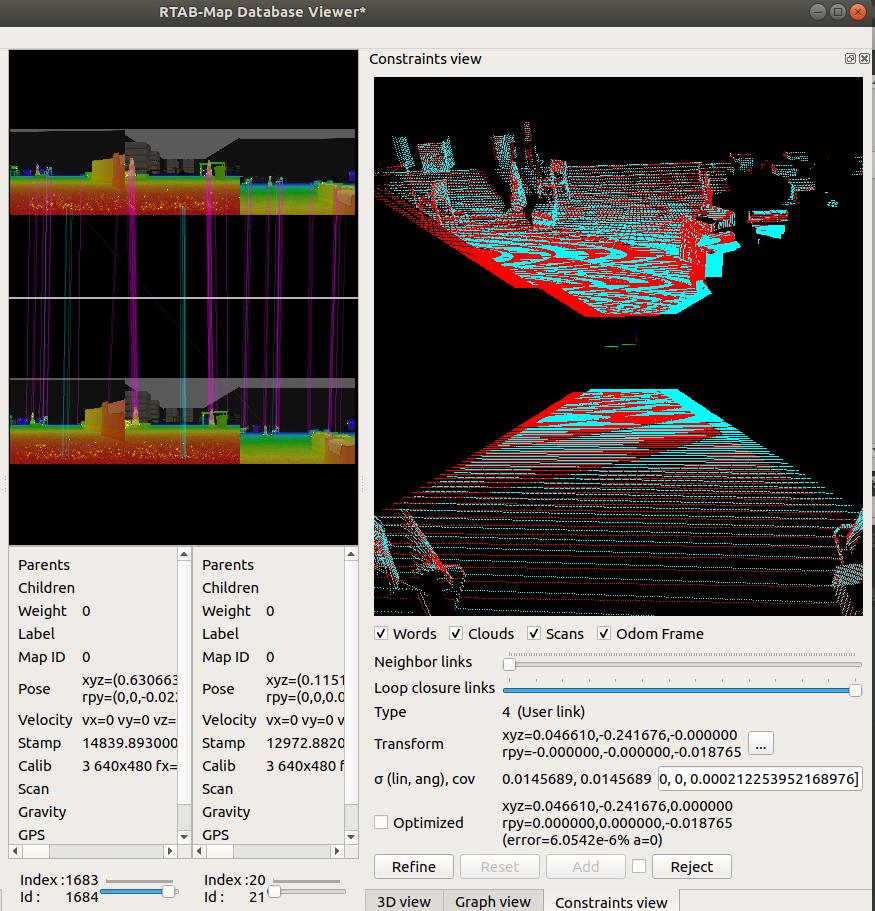
With Mem/DepthAsMask=false and Kp/RoiRatios="0 0 0 0.45", this is fine for loop closure detection in this kind of environment, but not so for transformation estimation. Setting RGBD/LoopClosureReextractFeatures makes rtabmap reextract features with Vis/ parameters, thus using close features and forcing to extract only in depth range: