Hi,
between 2 and 3, the motion estimation thinks that the camera didn't move. The environment is quite symmetric:

(two different locations)
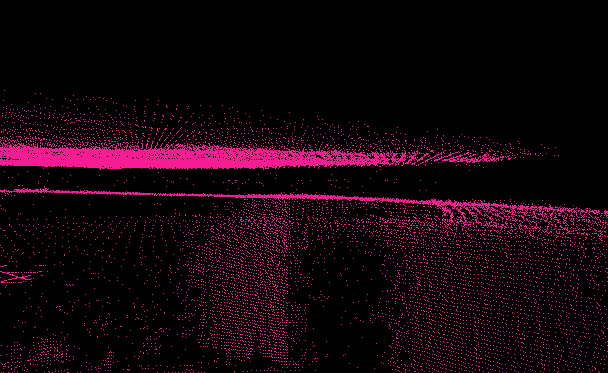
As the depth sensor doesn't see far (to see distinctive features in the background), visual features are mostly extracted from the close symmetric area. It this case the visual features are wrongly matched. By changing
Vis/MinDepth to 2 meters to ignore some close symmetric features, I am able to get a correct transformation between 2 and 3:
xyz=0.007153,-1.211038,0.000000 rpy=0.000000,0.000000,0.020160
There are some other problems in the scan. There are a lot of artifacts in the depth images:

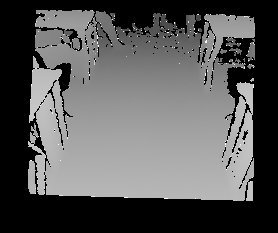
See the small bright pixels in the depth (meaning closer pixels) along the edges. Were they streamed using JPEG compression? Compress them in PNG instead. If you use ROS, make sure to use compressedDepth image_transport plugin to stream depth images.
The local transform for the top camera seems a little off, causing a second ceiling with offset around 10/15 cm:
cheers,
Mathieu


