Dear All,
hoping you have have a nice day,
i wish to ask some question here which i couldnt figureout myself
actually, after some search, i did found one problem similar to mine here
Below-ground-flat-floor-detectionhowever the structure was a lot different.
therefore i want to know if anyone could help me here with this rtabmap
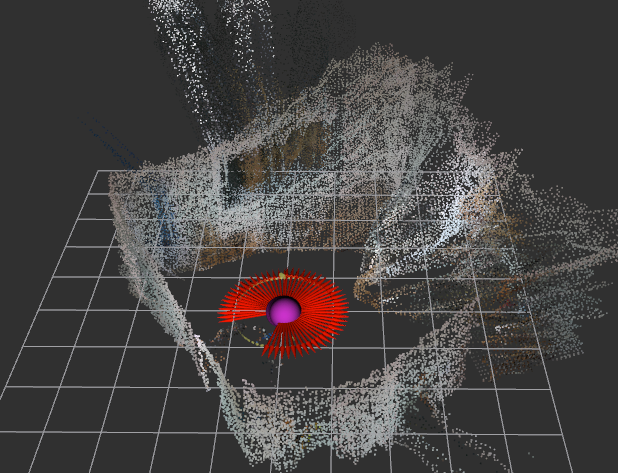
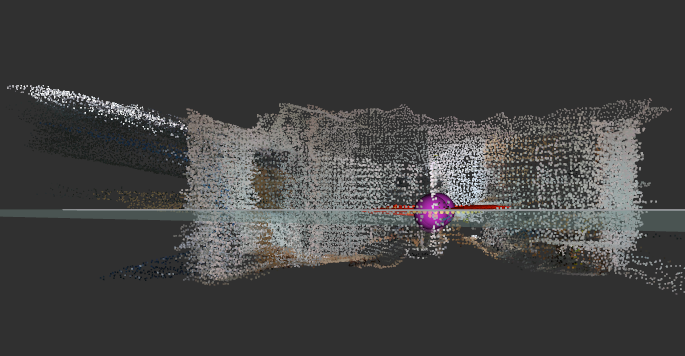
to bring my map above grid/ground
i had also search over
rtabmap parameter but there is nothing i found such as setting the camera height or something similar
while from previous case above was solved by transformation, from camera_link to base_link....
but in my case, i dont know what to do...
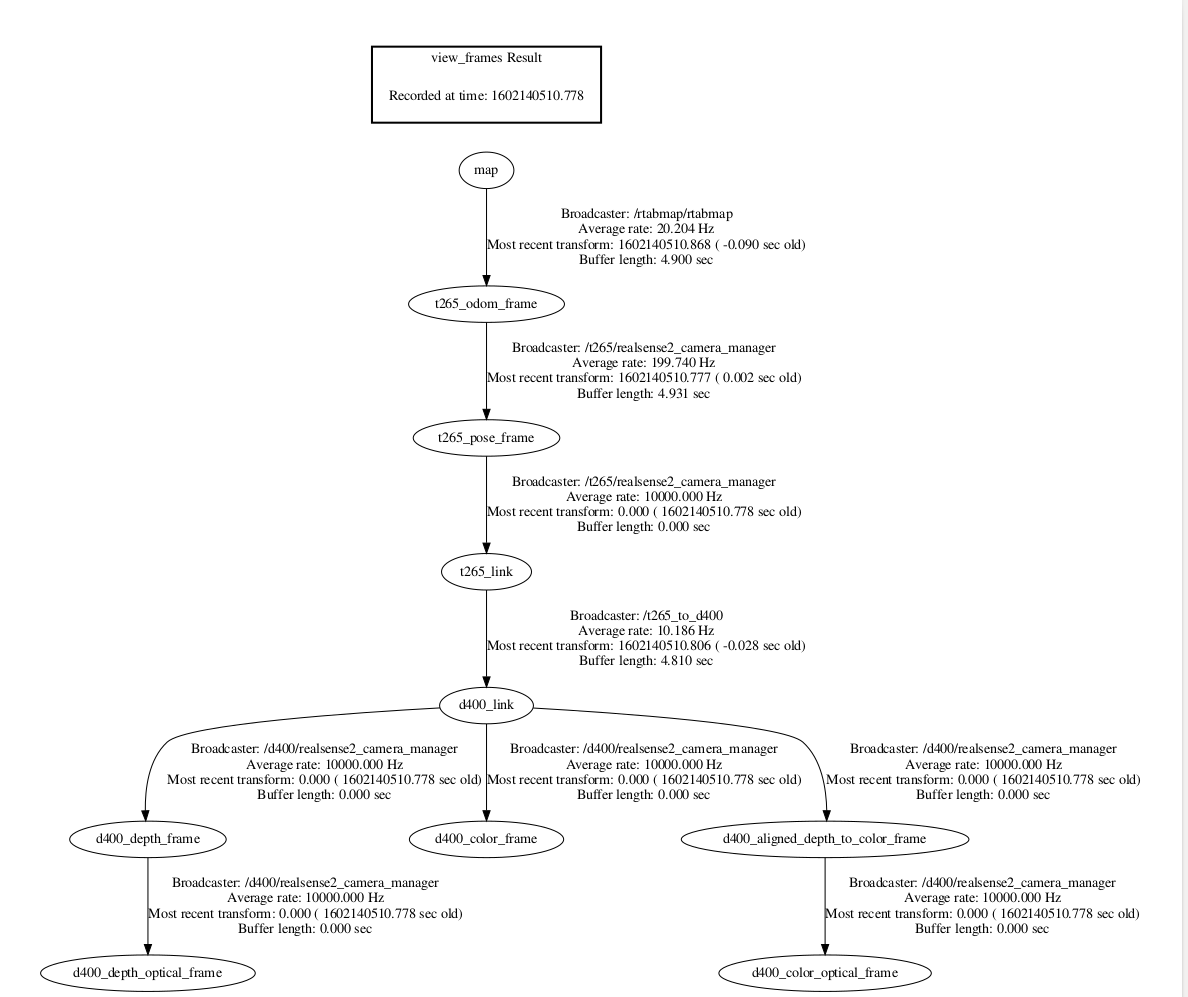
my frame id now is t265_link
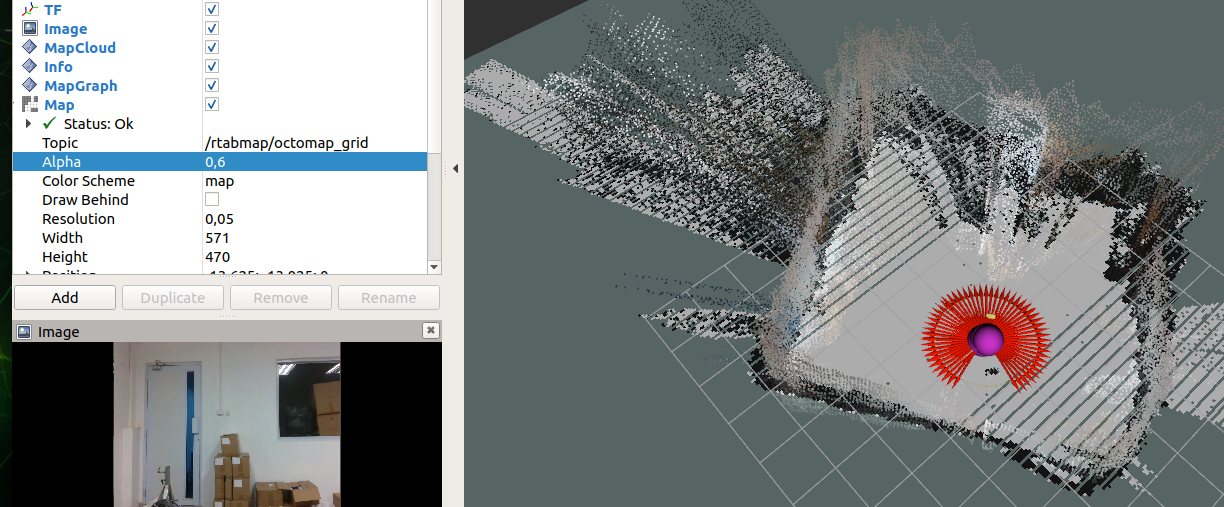
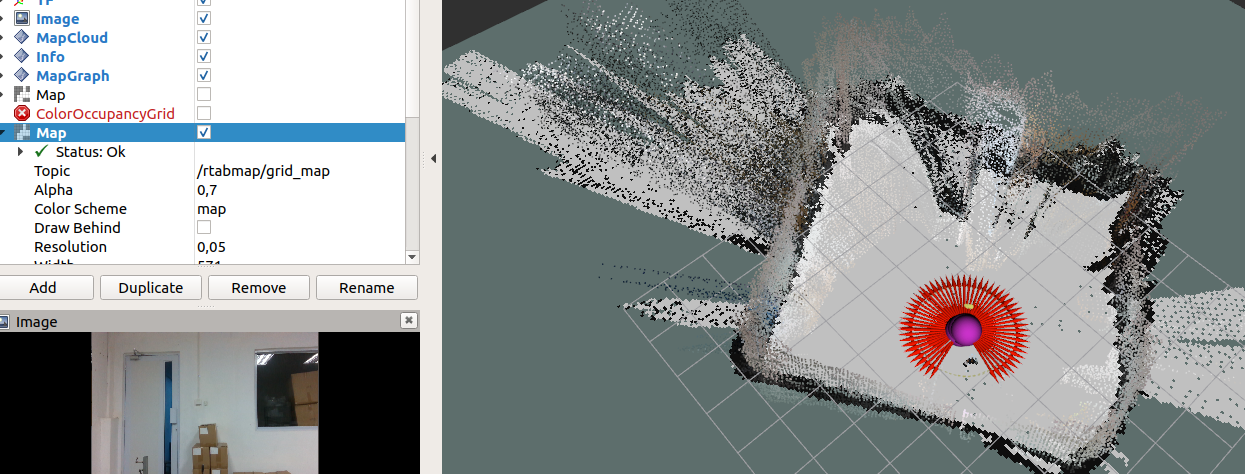
2nd question: why the octomap_grid on 2nd pic have gray line on the grid map?