Hi Mathieu,
I'm doing some experiment using your setup for
small environments and it works great during my mapping session, i.e. the tracking is done correctly and the point cloud is nicely incremented during sensor movements. I also added post-processing to refine graph links and then I updated the cache using Edit --> Download all clouds.
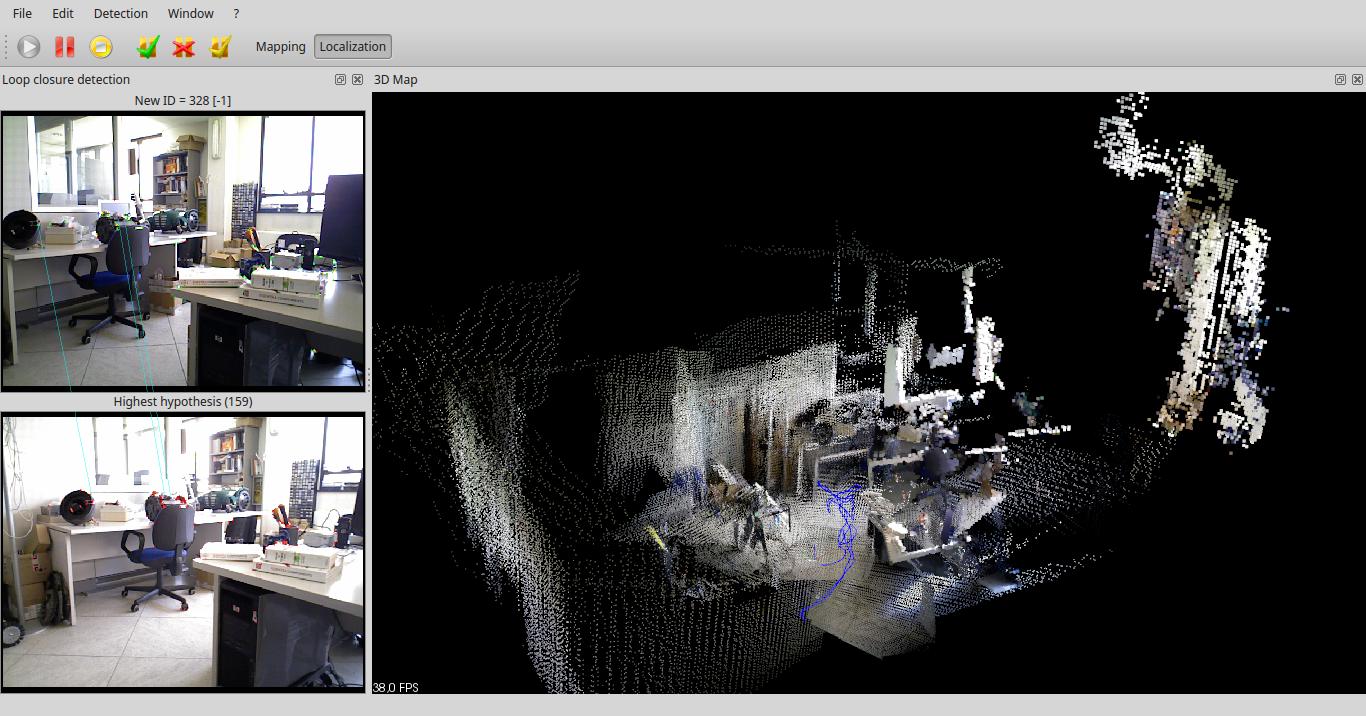
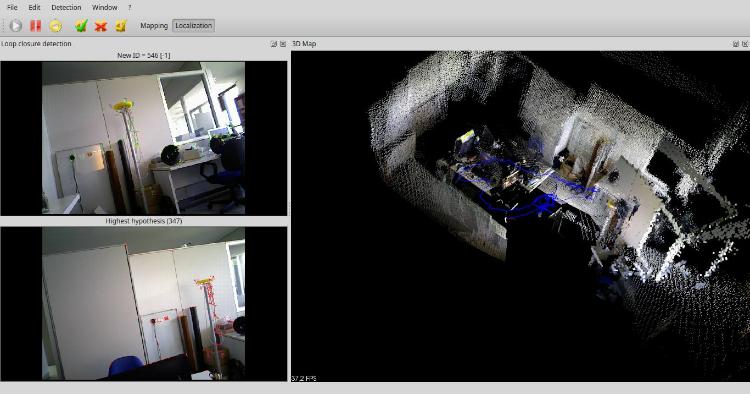
After this database was created, I wanted to perform a localization session in this environment, enabling the system to globally re-localize the sensor without updating the map. Unfortunately, when I start the Localization, the system seems to localize and track the sensor (no red frames, just some yellow local loops) and a trajectory is being drawn but the point cloud acquired by the sensor is totally misaligned with the current point cloud of the environment.
I attached a screenshot of the user interface, in the right part of the map you can see the sensor point cloud misaligned of about 45° against the environment, even if the system correctly finds loop closures and perform tracking.
Am I doing something wrong?
Thanks,
regards
~Guido