Hi,
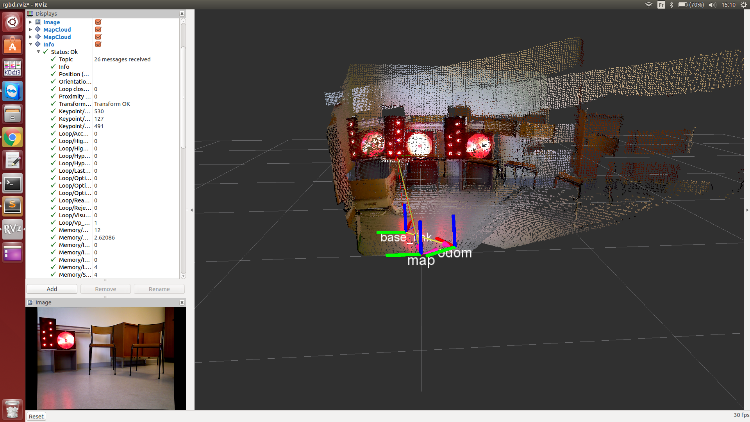
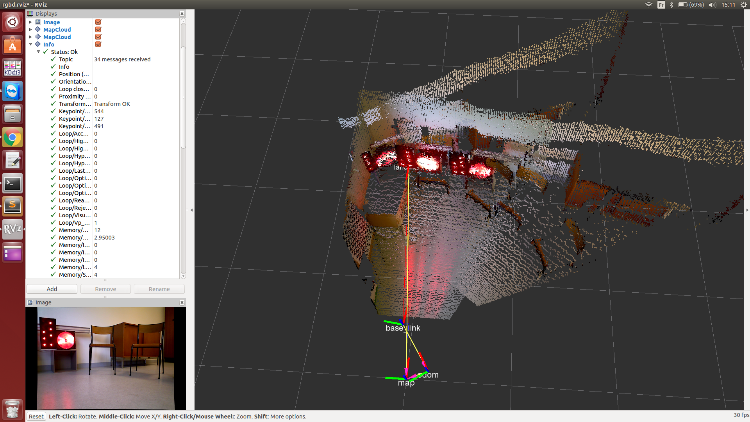
I tried to save the data in the rtabmap.db file, but was not able to view it using rtabmap-databaseViewer. So I have attached the screenshots of the problem. In the "info" field in rviz, we can see that it says that no loop closure has been detected, but the /map -> /odom tf is not zero. When I rotated the robot, /base_link rotated as expected. But after optimization, the /map -> /odom became non zero, the point cloud was not combined properly and /base_link became straight but /odom rotated. This is the problem which I am facing.
Also could you please explain how we have to use the data recorder and database viewer tools? When we have to start recording the data and how can it be seen in the database viewer?
Regards,
Kamal