Hi, I am running RTAB-Map in Humble using the dabai_dcw2 camera for mapping. This is my command:
ros2 launch rtabmap_launch rtabmap.launch.py \
rtabmap_args:="--delete_db_on_start" \
rgb_topic:=/camera/color/image_raw \
depth_topic:=/camera/depth/image_raw \
camera_info_topic:=/camera/color/camera_info \
frame_id:=camera_link \
approx_sync:=true \
qos:=2 \
rviz:=true \
queue_size:=30
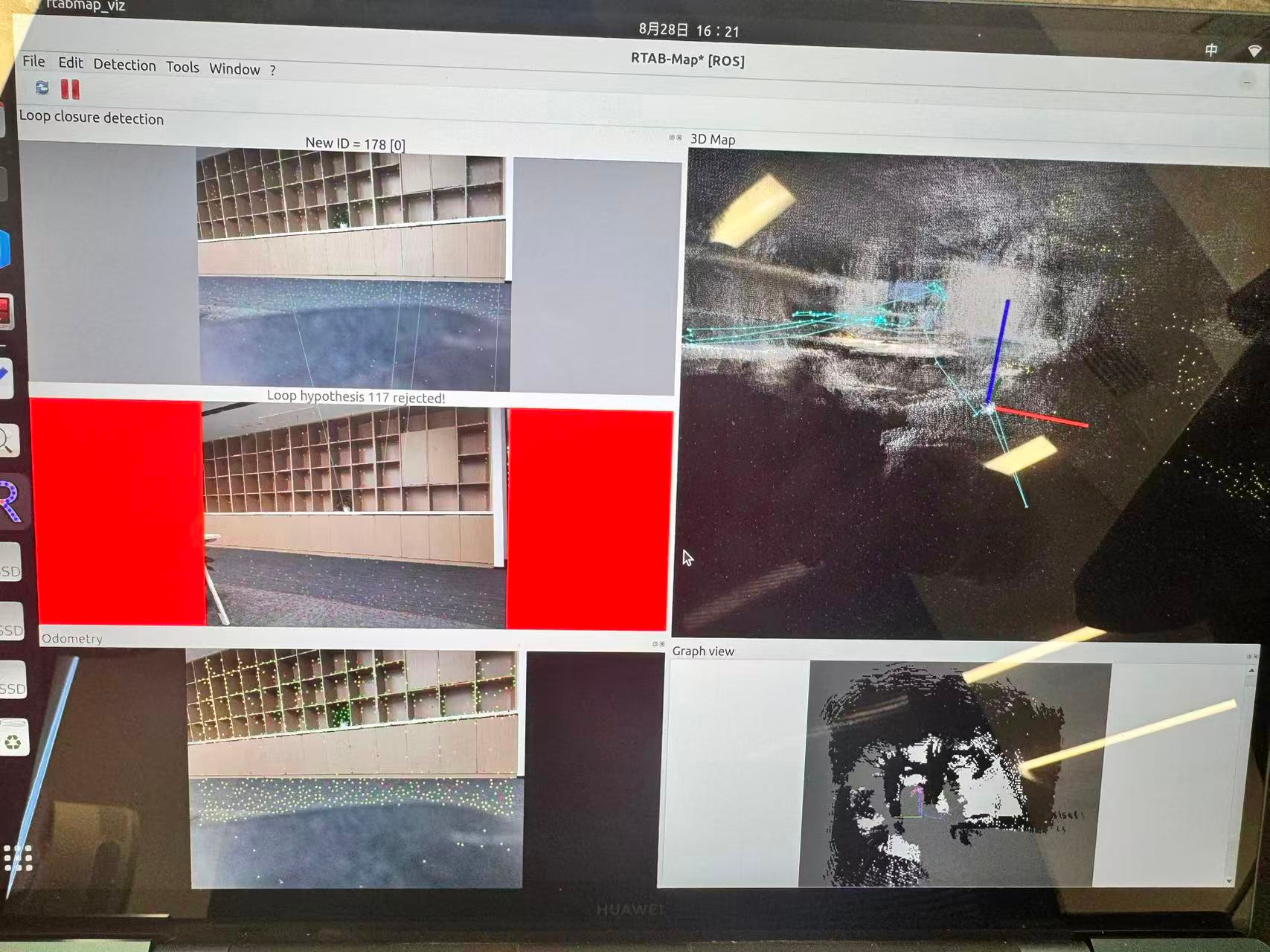
The map I am getting is very strange, as shown below.
When I was mapping in Foxy, my point cloud data looked much better, and the overall point cloud was not messy, as shown below.

Could you please tell me what might be causing this? Thank you for your help!

