Hi Mathieu,
I'm trying to follow the whole procedure for Mapping/Localization in RTAB-Map with ROS.
I created a launch file for the mapping phase which runs a node for publishing the wheel odometry. SLAM correctly uses it during teleoperation to map the environment. Loop closures are found and the graph is successfully optimized achieving great pose accuracy (~20cm), your software is doing a remarkable job!

Next, I would like to proceed with the localization in the previously created database.
I created another launch file for mapping without "--delete_db_on_start" and with "Mem/IncrementalMemory" set to "false" and relaunched it with rtabmapviz mode. After a little while, the robot is correctly re-localized, since I see the mapping trajectory together with keyframes correctly aligned with the current robot position (cyan line in the posted screenshot), but the database map is not loaded, so I pressed the "Download map" (is there a way to automate this from launch file?) to do it. Unfortunately, rtabmapviz stucks on this progress dialog without doing anything, the last log message is "[INFO] Downloading map...", but nothing happens:
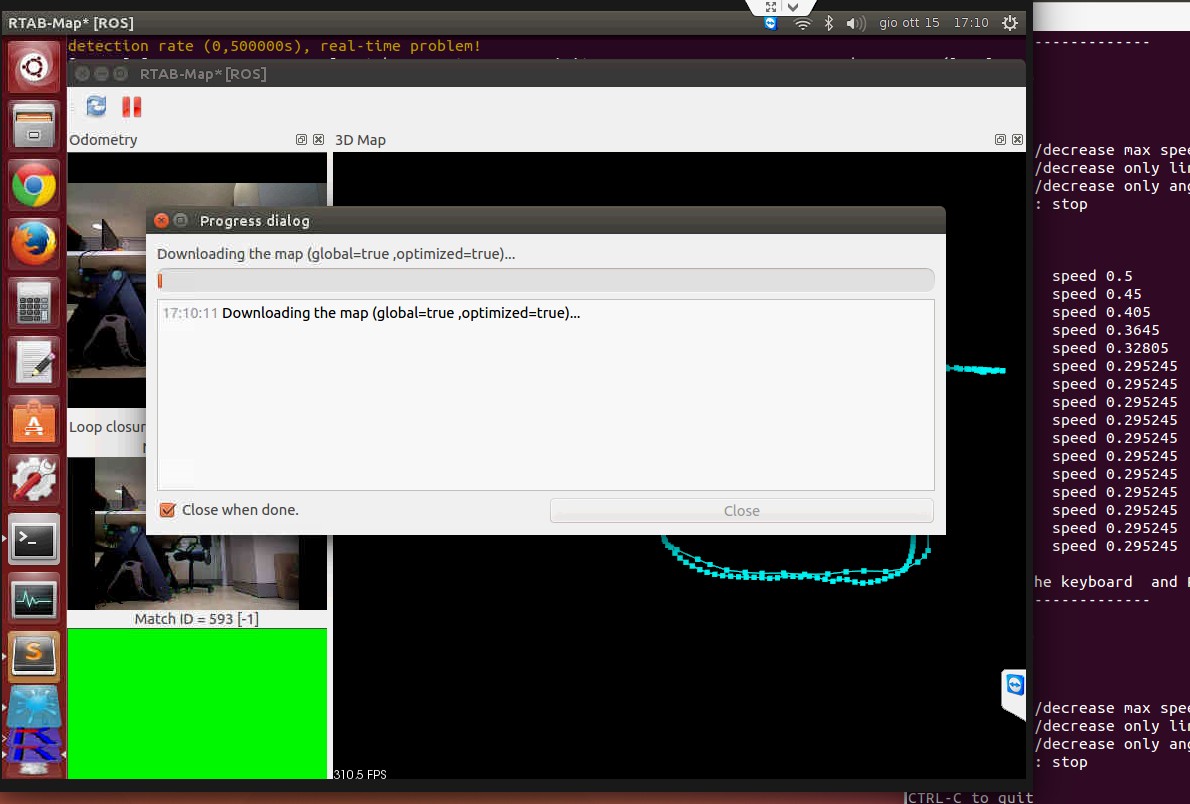
Do you know why is this happening? Did I create the map in a wrong way during mapping maybe not including some data?
Many thanks,
Guido
~Guido

