I do no have the turtlebot but have a kinect xbox360. I followed the following commands but the map isnt showing up:
roslaunch turtlebot_bringup minimal.launch
shows this:
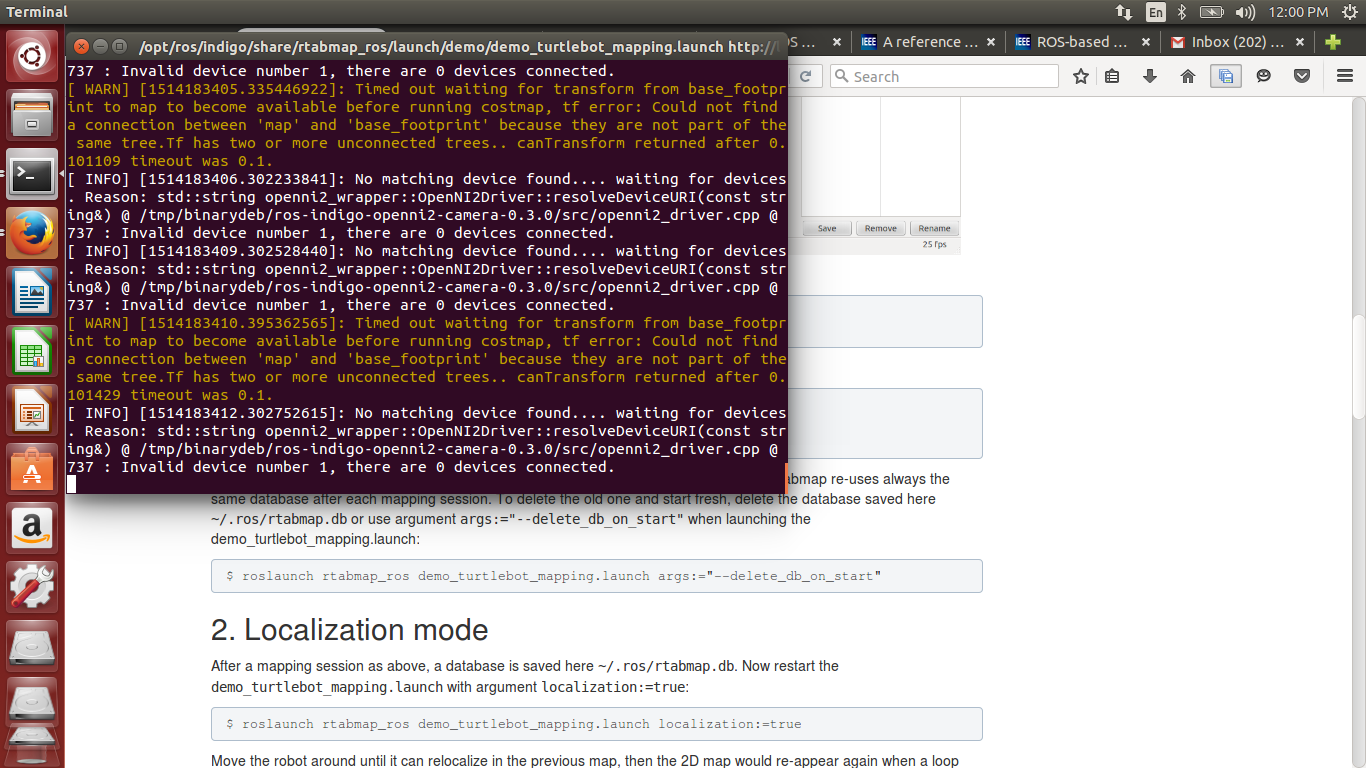
roslaunch rtabmap_ros demo_turtlebot_mapping.launch
shows this:
and
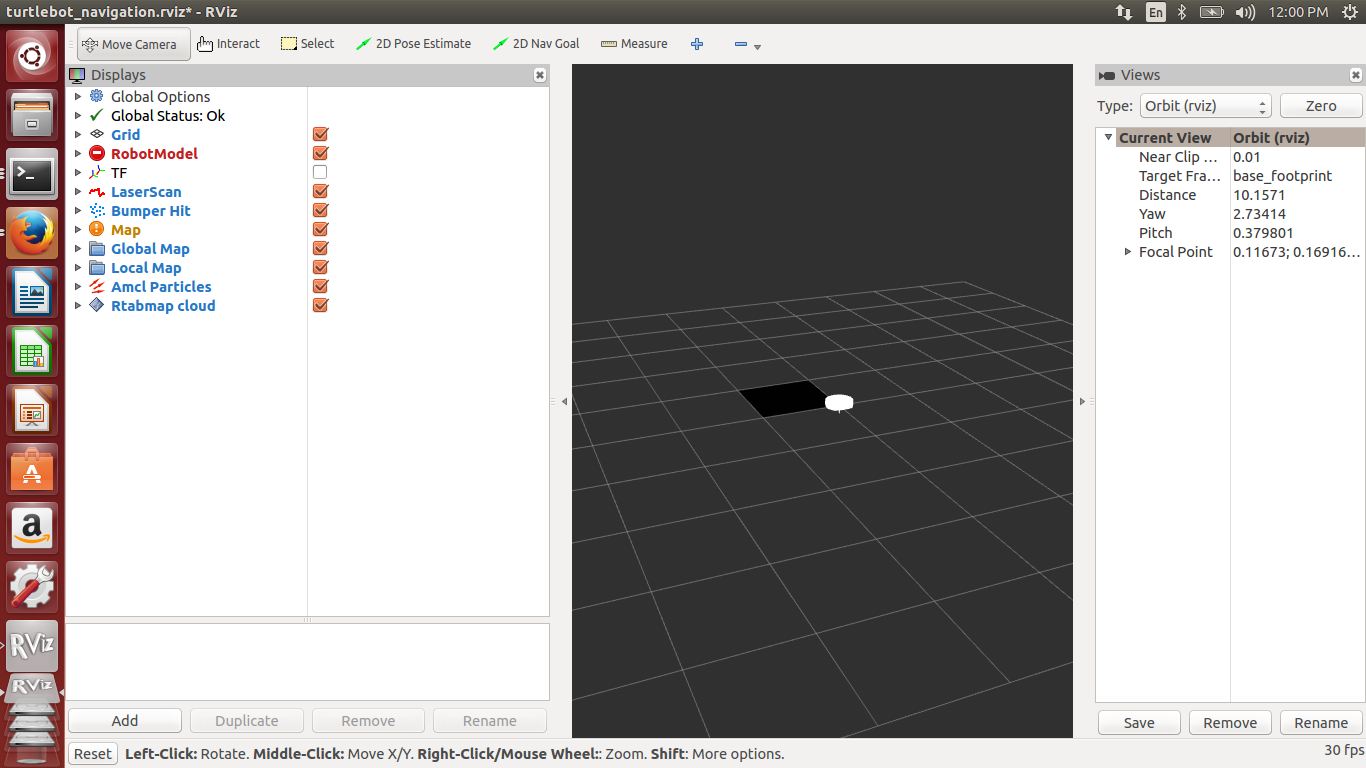
roslaunch rtabmap_ros demo_turtlebot_rviz.launch
shows this:
I want to to make a map from of a real indoor environment and then navigate using the turtlebot model. I have tried using rtabmap_ros with hand-held mapping. Normally the rtabmap is able to generate point cloud and the map generation works fine when just using the rtabmap gui.

