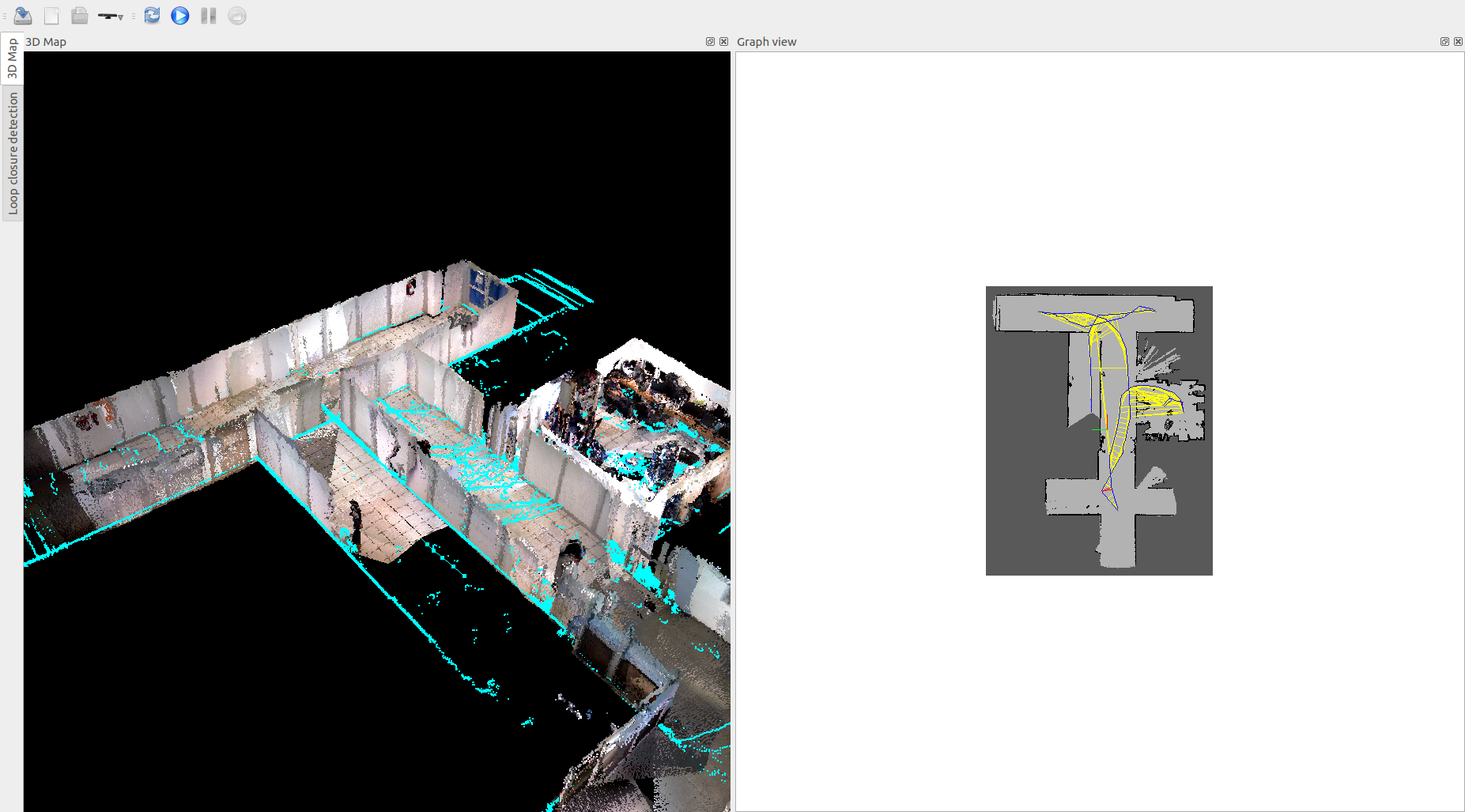
What I meant was that the robot poses drifts from the real trajectory considerably resulting in duplicated corridors on the 3D pointcloud and wall apearring where there should be nothing.
I am using a Toyota HSR the odom topic is based on wheel encoders on a holonomic base.
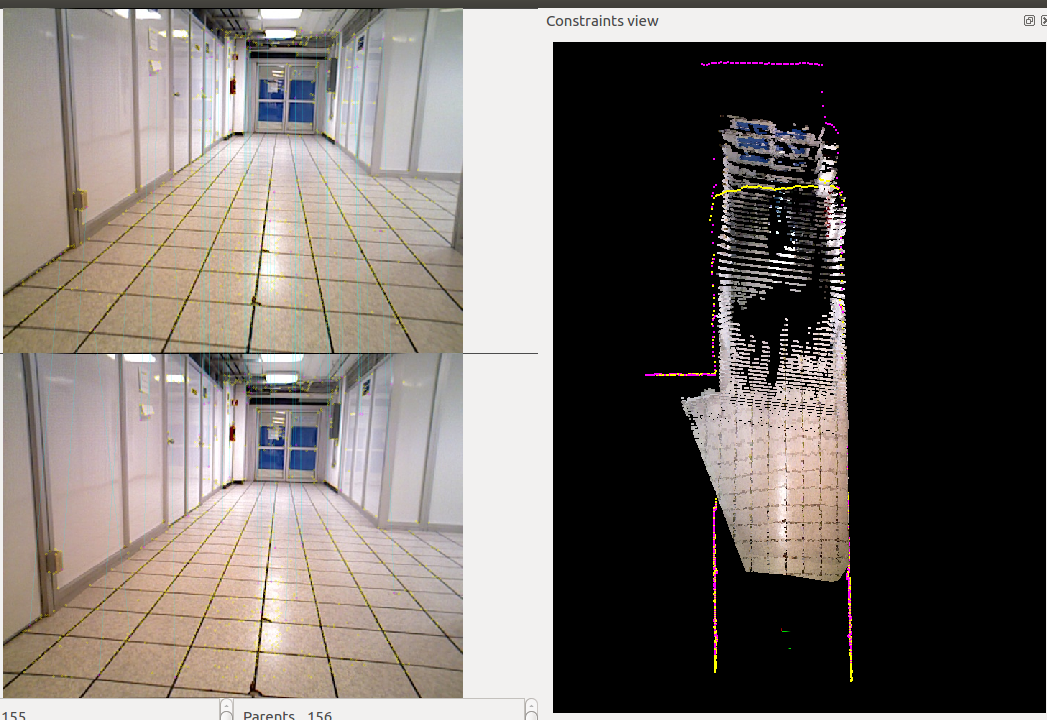
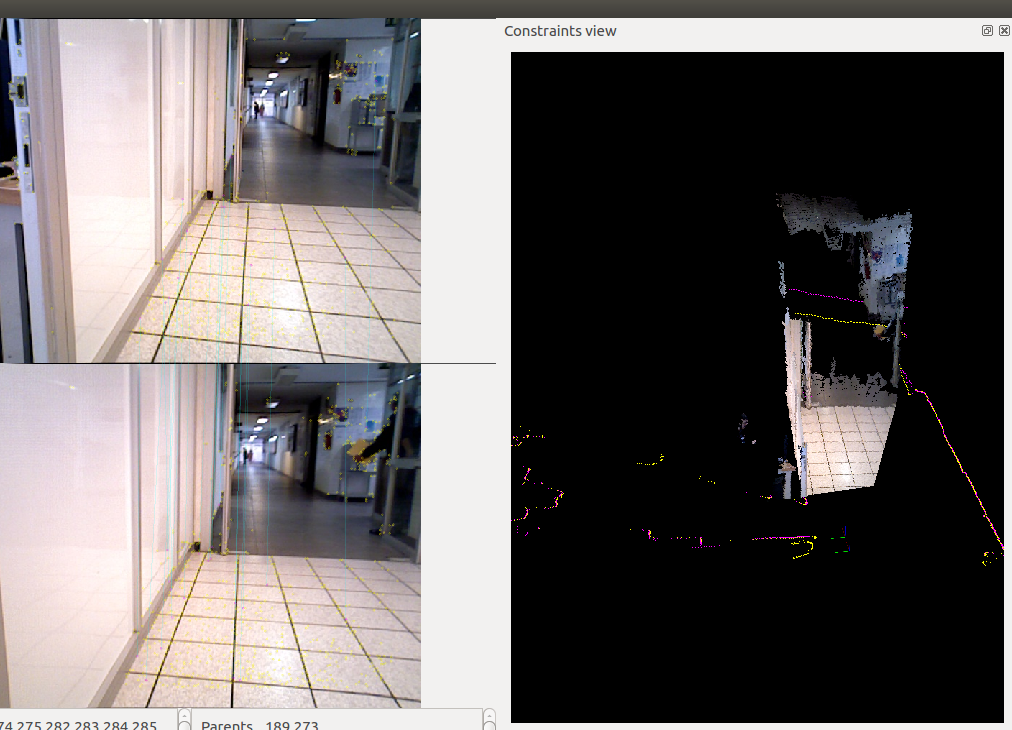
If I understood the warnings correctly RTAB map reports it can't find good correspondences thus failing to find loop closures and sometimes it finds "incorrect" loop closures leading to a mapping failure.
Another thing I noticed is that I usually get:
[pcl::IterativeClosestPoint::computeTransformation] Not enough correspondences found. Relax your threshold parameters.
Rtabmap.cpp:1755::process() Rejected loop closure 124 -> 284: Not enough inliers
Rtabmap.cpp:1755::process() Rejected loop closure 151 -> 316: Cannot compute transform covariance(....
Also:
[ERROR]OptimizerG2O.cpp:710::optimize() Computing marginals: vertex 151 has negative hessian index (-1). Cannot compute last pose covariance.
At that point the mapping usually fails.
Thanks in advance