Hi Mathieu,
Below is the CPU loading difference between launch launch file or not. It seem that lots of CPU resource is used by somethings which are loaded into nodelet by rtabmap, not iai_kinect2.
[kinect2_bridge + robot navigation stack]
1. move_base(36%)
2. firefox(2%)
3. nodelet(1%)
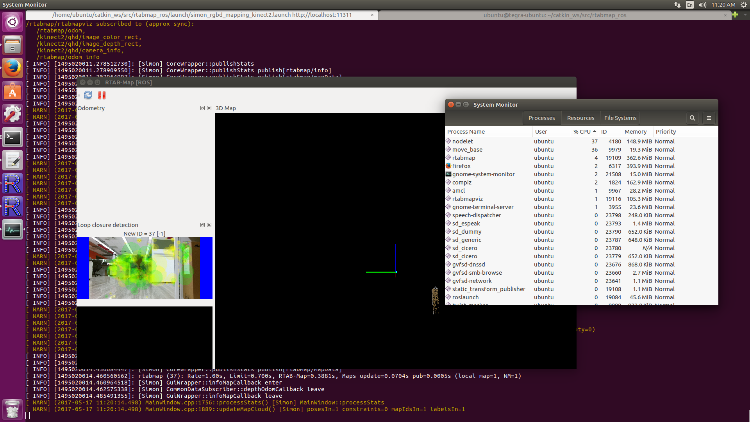
[kinect2_bridge + robot navigation stack + rtabmap]
1. nodelet(37%)
2. move_base(36%)
3. rtabmap(4%)
iai_kinect2 package may be configured to use GPUs of the jetson if it is not.
=> I didn't enable iai_kinect2 with GPU acceleration yet. I will try to enable it.
Just to make sure, rtabmapviz is launched on the jetson?
=> Yes, I run the rtabmapviz on Jetson. I didn't use remote mapping.
Regards.

