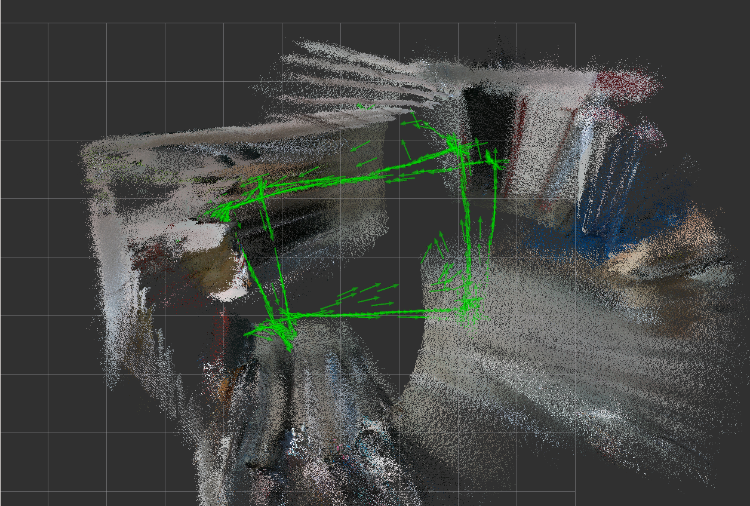
I am trying to map an indoor area with Realsense d435i. This is the result of it:
- This the result with the map displayed and the green arrows are the odometry from rgbd_odometry:
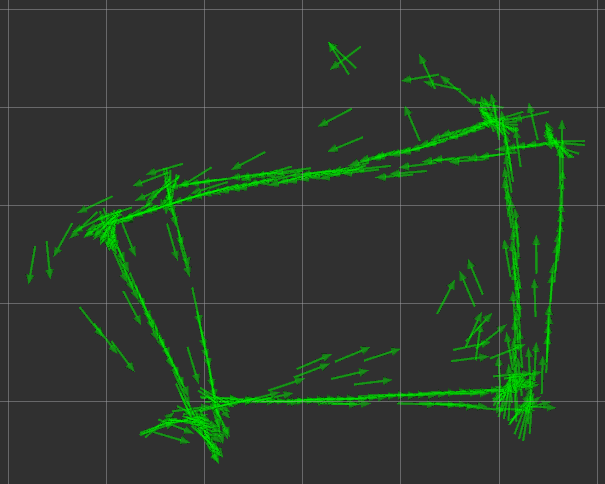
- This has just the odometry:
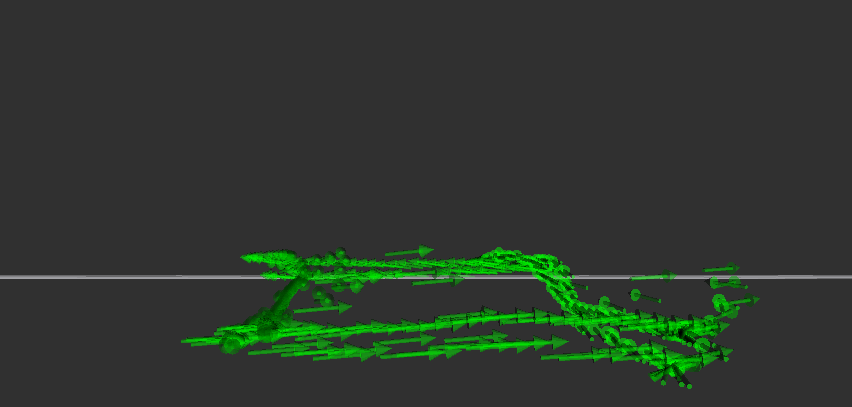
-This is the odometry from the side (to show that it is also moving along the z axis when in reality it shouldn't):
-This is the ground truth of odometry:
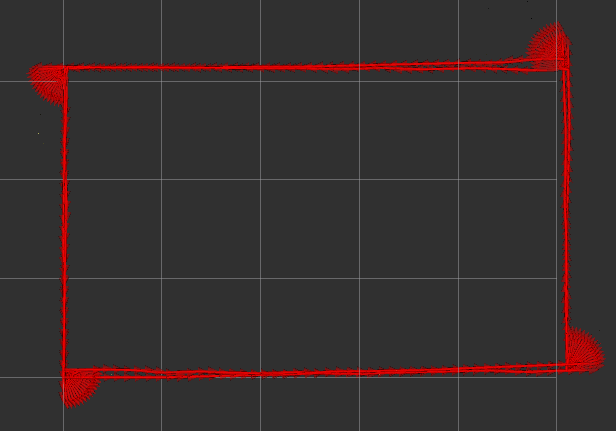
The bot starts moving from the bottom left of the images.
My parameters are in this file:
params.yamlThe problems I am facing (as it can be verified from the above images) are:
- The odometry output is good in some straight line and isn't in others
- The odometry is faulty during turns
- The odometry goes haywire after Loop Closure.
Is there any tuning you can suggest to make it work better?
Thanks in advance

