Dear People.
I have the following hardware:
pixhawk mini
Jetsontx2
zed camera
and the following software
ROS kinetic
Ubuntu 16.04.1
Jetsonpack 3.2.1
ZED=SDK version 2.7
Mavros
mavlink
I am using mavros to interface the pixhawk to my ROS environment.
I am trying to read the following topics:
/mavros/global_position/global
/mavros/global_position/local ////////
/mavros/imu/data
/mavros/local_position/odom //////
/mavros/local_position/pose
/stereo/camera/rtabmap/odom
I also have drone.xacro model.
I have recorded some bagfiles and when I visualized them in RVIZ I can see the topics
/mavros/global_position/local
and
/mavros/local_position/odom
Totally shifted and rotated. This can be seen in the following figure:
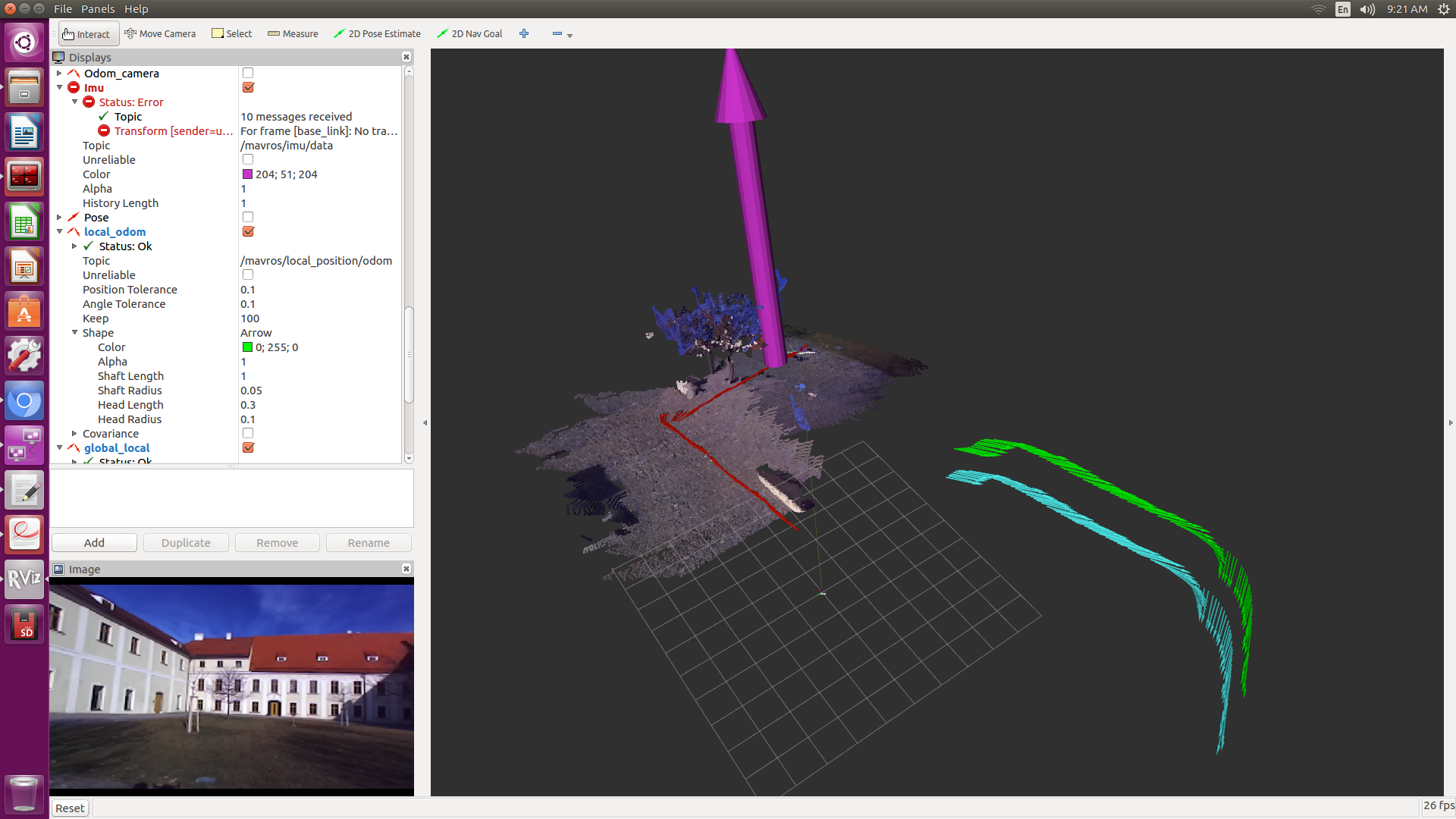
* The red arrow set is the /stereo/camera/rtabmap/odom topic, in other words the odom calculated by rtabmap based on the stereo images.
* The green arrow set is the /mavros/local_position/odom topic that is shifted and do not follow the drones position in RVIZ
* The blue arrow set is the /mavros/global_position/loca topic that is shifted and do not follow the drones position in RVIZ
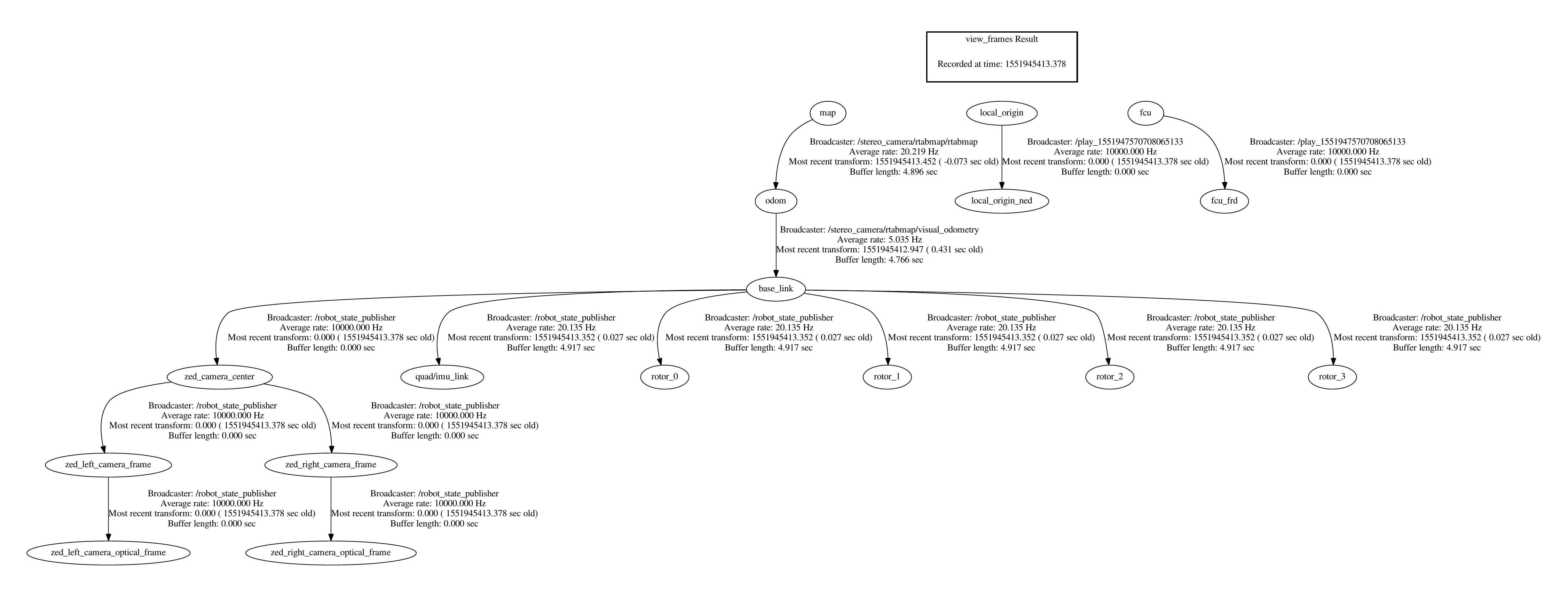
The tf tree is depicted in the next figure:
The way I am calling mavros is as follows:
<arg name="mavros_transformation" default="0" />
<arg name="ns" default="/"/>
<arg name="fcu_url" default="/dev/ttyTHS1:921600"/>
<arg name="host_ip" default="10.42.0.253" />
<arg name="gcs_url" default="" /> <!-- GCS link is provided by SITL -->
<arg name="tgt_system" default="1" />
<arg name="tgt_component" default="1" />
<arg name="serial_no_front_camera" default="819112072871"/>
<arg name="depth_fps" default="60"/>
<arg name="infra1_fps" default="60"/>
<arg name="infra2_fps" default="60"/>
<!-- Launch MavROS -->
<group ns="$(arg ns)">
<include file="$(find mavros)/launch/node.launch">
<arg name="pluginlists_yaml" value="$(find mavros)/launch/px4_pluginlists.yaml" />
<!-- Need to change the config file to get the tf topic and get local position in terms of local origin -->
<!--arg name="config_yaml" value="$(find mavros)/launch/px4_config_gp.yaml" /-->
<arg name="config_yaml" value="$(find mavros)/launch/px4_config_tbsd_forum.yaml" />
<arg name="fcu_url" value="$(arg fcu_url)" />
<!--arg name="gcs_url" value="$(arg gcs_url)" /-->
<arg name="gcs_url" default="udp://@$(arg host_ip)" />
<arg name="tgt_system" value="$(arg tgt_system)" />
<arg name="tgt_component" value="$(arg tgt_component)" />
</include>
</group>
and the px4_config_tbsd_forum.yaml I am using according to a forum
https://github.com/mavlink/mavros/pull/791/files/a3847cd4016b9da7b7b6ae4f633146a7e8ecf77f#diff-57d2f68a3e0e5cfa2db14ac20d8845ddis:
px4_config_tbsd_forum.yamlAnd also /mavros/imu/data topic is delay with respect to the base_link of the drone.
Can some one help me or suggest what is wrong???
Thank you so much.

