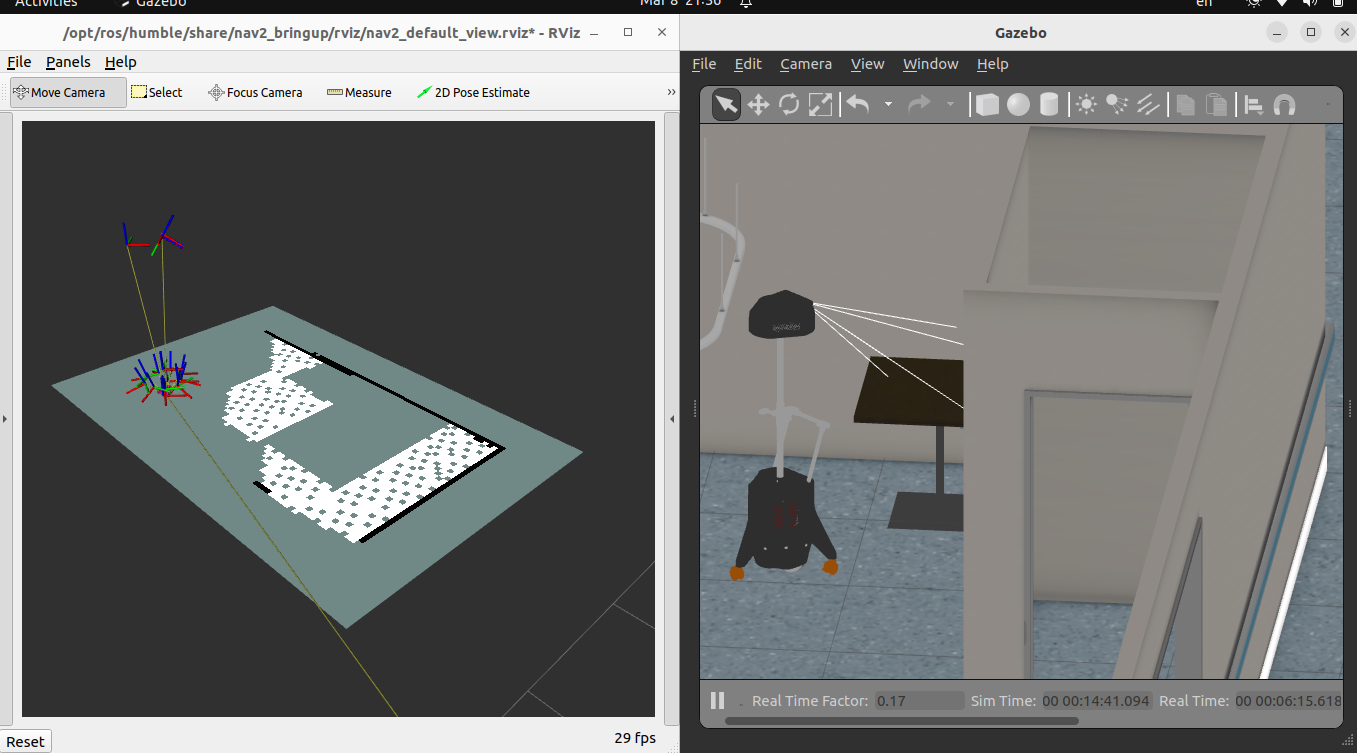
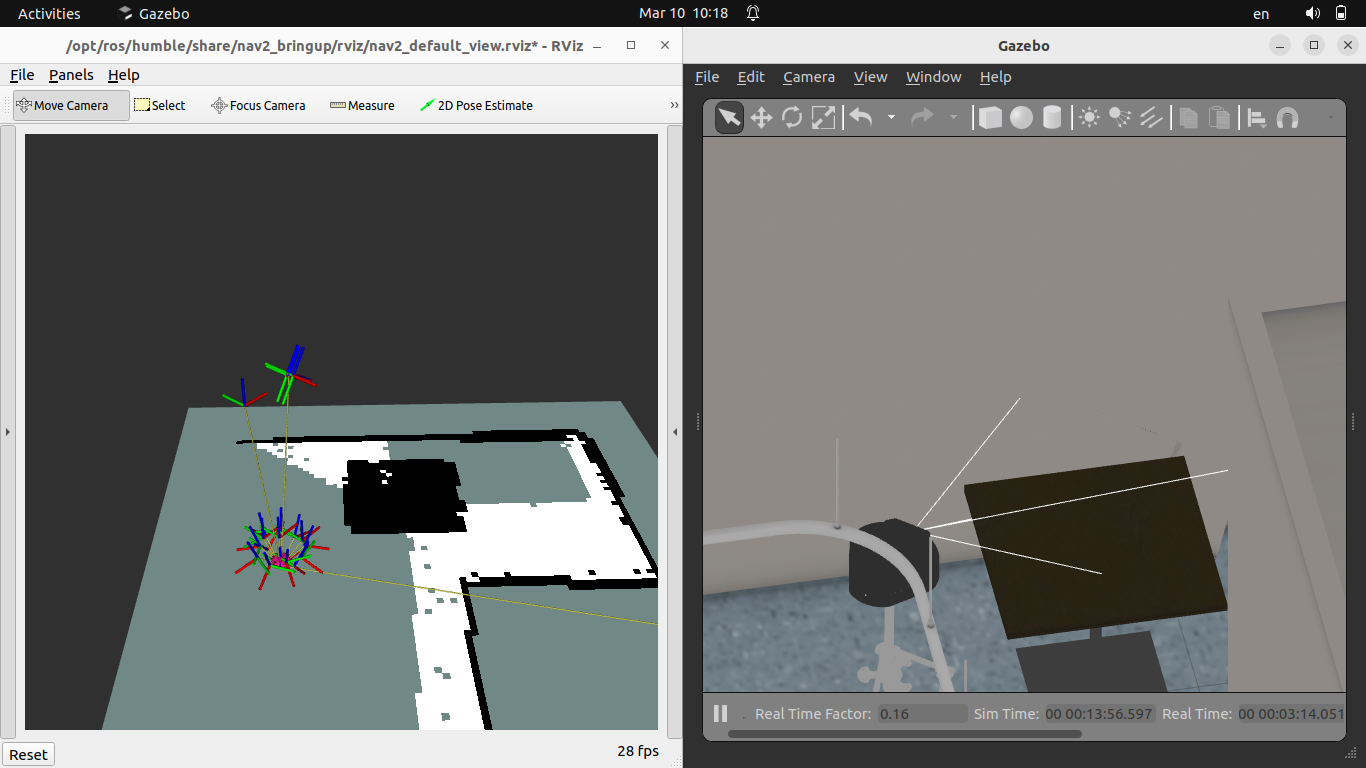
Mobile Robot with Z2i Camera, Table Surface Not Detected as Obstacle in RTAB-Map

Mobile Robot with Z2i Camera, Table Surface Not Detected as Obstacle in RTAB-Map

|
Re: Mobile Robot with Z2i Camera, Table Surface Not Detected as Obstacle in RTAB-Map
|
Administrator
|
Re: Mobile Robot with Z2i Camera, Table Surface Not Detected as Obstacle in RTAB-Map
|
|

Re: Mobile Robot with Z2i Camera, Table Surface Not Detected as Obstacle in RTAB-Map
|
|
| Free forum by Nabble | Edit this page |