Hi Mathieu,
I have a problem regarding mode switching between localization and mapping. The goal that I want to achieve is to continue mapping, Here's my plan:
1. Run Rtabmap in localization mode by loading map.db
2. Make a copy of the db file (map_temp.db)
3. Switch the db file from map.db to map_temp.db by using rtabmap/load_database service
4. I launch a launch file to update the param by <rosparam> command to change my config from localization config to mapping config (because it is different), and call rtabmap/update_parameters.
5. Switch to the mapping mode using rtabmab/set_mode_maping service
--- I do some mapping ---
6. After that, I want to revert it back to mapping and save the temp.db to the original db file. (I did this because I want to have a backup incase if the new map is broken)
7. Call rtabmap/set_mode_localization service.
8. I launch another launch file to load localization params, and call rtabmap/update_parameters.
9. Make another copy of the map.db to map_temp2.db.
10. Switch db file to the map_temp2.db ( I did this to make sure the map_temp.db is being saved).
11. Overwrite map.db with the map_temp.db
12. Switch to map.db and continue localizing.
I had problems:
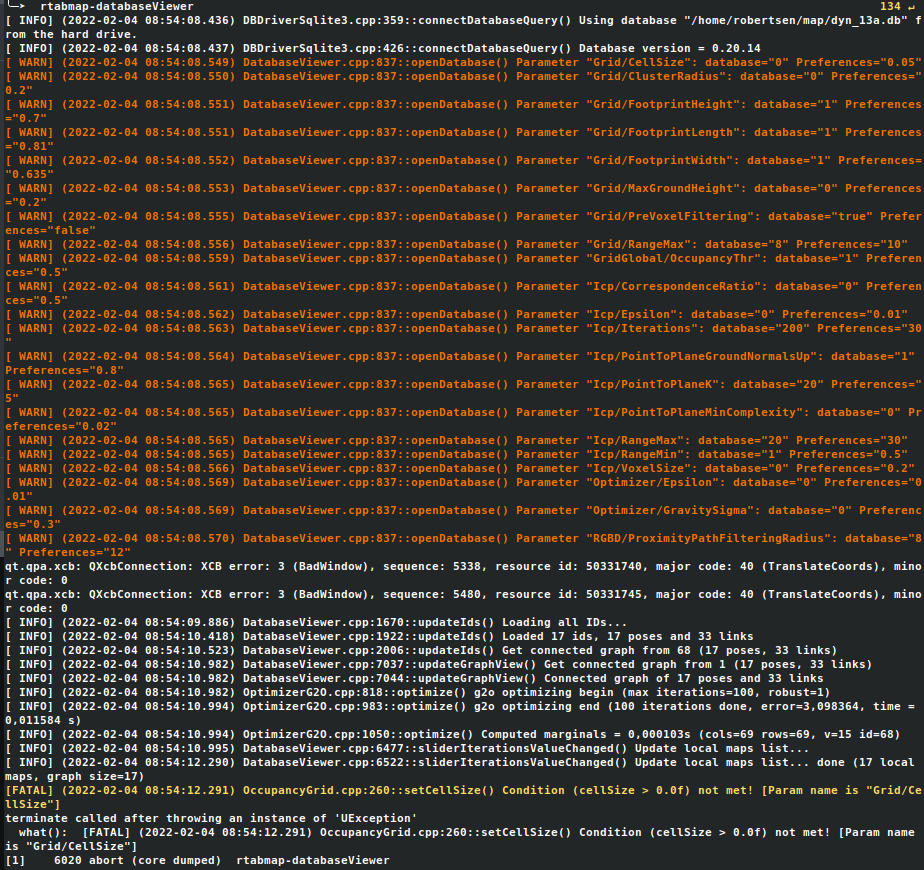
* at point 4 and 8. I have set the Grid/CellSize to 0.1 but there is an error on the terminal mentioning that Condition (cellSize > 0.0f) not met!. I don't know what is happening.

* at point 10. The rtabmap/rtabmap dies.

*I tried to reload all the nodes after mapping is done and load a map_temp.db, but I noticed the map_temp.db is not updated (the new graph is not shown). I think the update_parameters is not working, so it won't save the map if some params are bad. When I tried to open the db using rtabmap-databaseViewer, the app just stopped working. I think the problem is on the string parameters thing. Do you have any idea how to rosparam set as a string?
Do you know what is causing the problem? Is something weird with the steps? Is it the correct way to update the parameters and change between db files? I hope I can hear your feedback soon.
Thanks,
Regards,
Robert

