Hello, I have been reading through the forums and repo to see how I can modify parameters like the
`Inliers` when `OdometryF2M.cpp:372::computeTransform() Registration failed: "Not enough inliers 0/20 between -1 and 0"
[ INFO] [1497263650.114361136]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.026155s ` occurs.
(reference:
http://official-rtab-map-forum.206.s1.nabble.com/WARN-2017-06-12-18-34-10-699-OdometryF2M-cpp-372-computeTransform-Registration-failed-quot-Not-enoug-td3306.html)
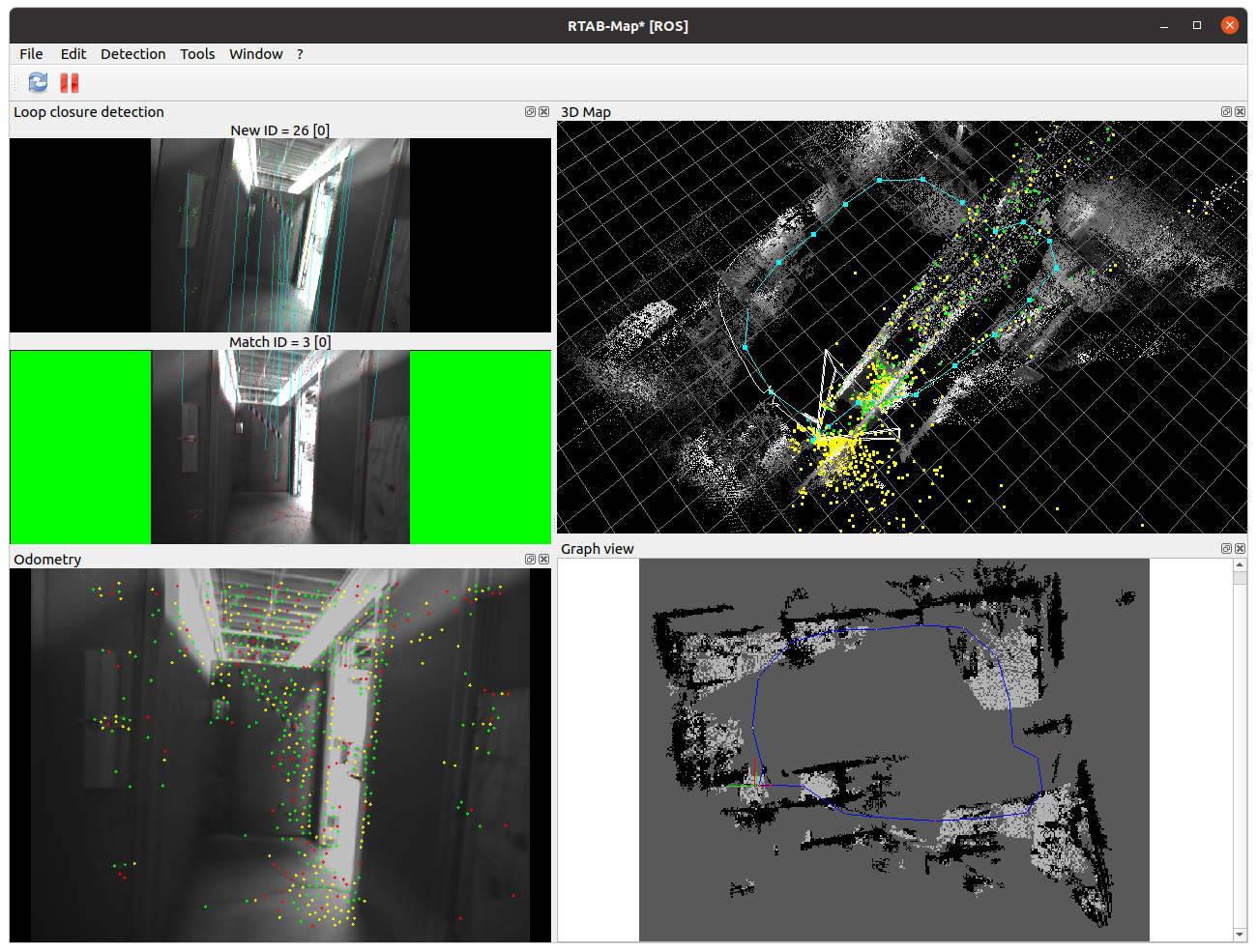
I'm working on using RTAB-Map for a tight-space and semi-faster turns.
ros bag hereSteps to reproduce:
#Launch D435i infra1 + infra2
`ros2 launch rs_launch.py unite_imu_method:=1 enable_gyro:=true enable_accel:=true enable_infra1:=true enable_infra2:=true fps:=90 initial_reset:=true`
#Launch RTAB-Map stereo example
`ros2 launch realsense_d435i_stereo.launch.py`
To modify the parameters, I tried:
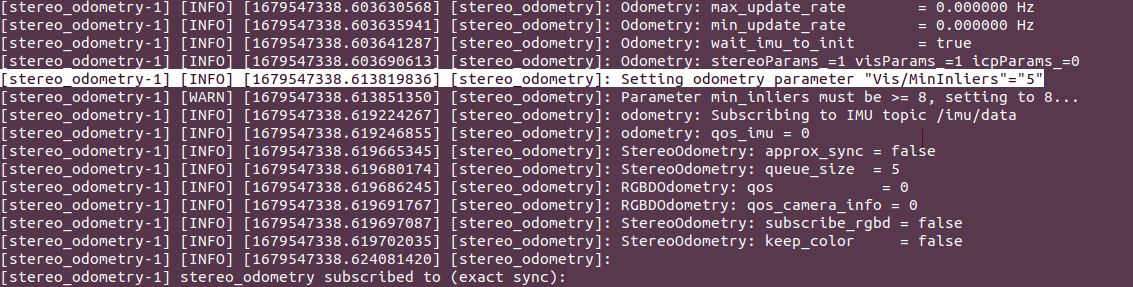
`ros2 launch realsense_d435i_stereo.launch.py rtabmap_args:="--Vis/MinInliers 5"`
`ros2 param set /stereo_odometry Vis/MinInliers value:="5"`
Although I have confirmed the values changed when running `ros2 param get`
But when the RTAB-Map shows red back ground (Odom lost track), the error message showed that the inlier threshold is still "0/20" instead of "0/5"
Could someone give a little more guidance on how I can change all the parameters? I would also like to change parameters like `Rtabmap/DetectionRate`
If you replay the bag, it does track points for the most part, and at the part where there are less points, I'd still like to give some estimation perhaps from dead-reckoning on the imu? (which I thought the example is using VIO).