Hi,
Thx for the info, I've updated the
Multi-Session tutorial to remove "Apply settings to detector", which doesn't exist anymore. RTAB-Map only shows the latest map, unless it has been merged with one of a previous session (by detecting a loop closure with a previous map).
>
However, RTAB-Map doesn't search for corresponding visual words in other (already processed) databases, but rather treats every session as a own map. > [...]
>
Shouldn't the program recognize the overlapping areas of the previous sessions and perform a loop closure to link them to an entire map like the map which is shown in the tutorial? Yes, it should try to detect automatically loop closures with previous maps. To know if RTAB-Map is comparing with past images, you can show the highest loop closure hypothesis by checking "Preferences->General Settings (GUI) -> 'Show image with the highest hypothesis'". Note that it must have enough matching features to accept a loop closure. To increase the rate of accepting loop closures on large-scale environment, you may want to enable "Preferences (Advanced) -> RGBD-SLAM -> Loop closure constraint -> 'Reextract features on global loop closure'".
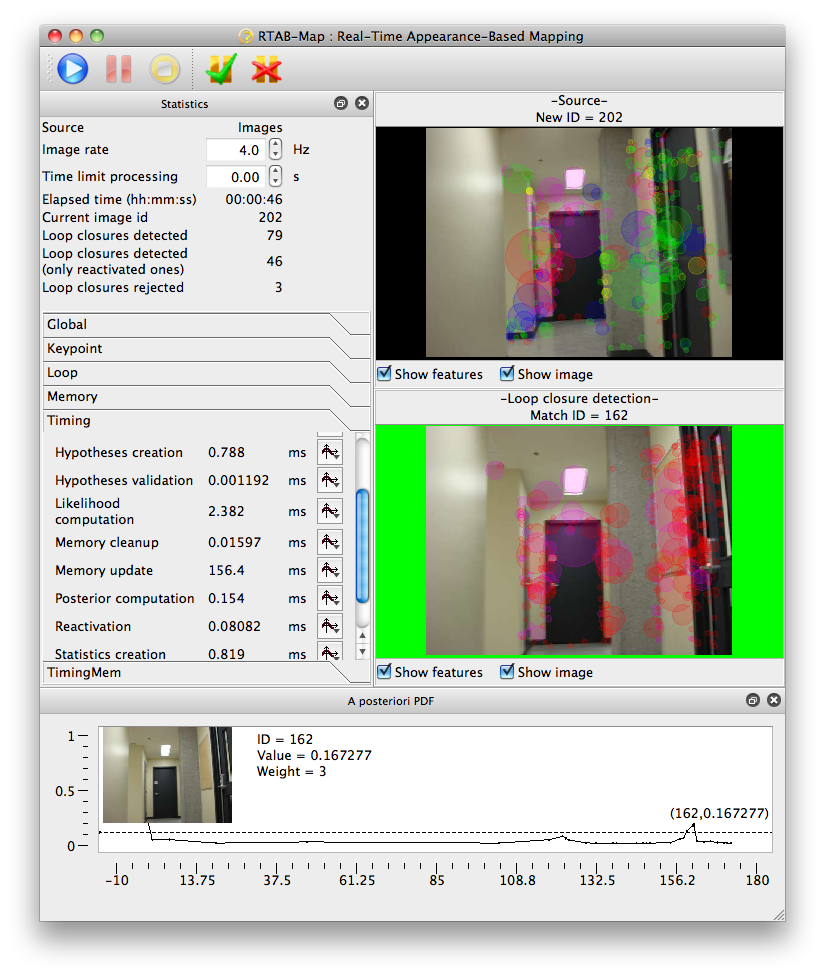
You can also open the view "Window -> Show view... -> A posteriori PDF" to see actual loop closure hypotheses with locations from the previous maps. From this
page:
"[A posteriori PDF panel] If the detection has run for enough time, you should see a curve with some dots. A dot represents a location in the Working Memory. The dot "-1" represents the "No loop closure" hypothesis. You can select a dot (only in graphics view mode... see right-click menu) to show up the related image corresponding to this loop closure hypothesis."